

























The BRIONVEGA COSMO TVC 26 MONITOR PANSOUND CHASSIS 509 30AX is a dual sided chassis with left side all signal / small power parts and right side all deflections and eht.
Middle Power supply unit and above that the SYSCONTROL UNIT.
This chassis was first time introducing STEREO HIFI feature with 2 way speaker output and first time one microcomputrer for PLL and controls.
Furthermore was using first time the ONE CHIP PAL DECODER TDA3561A (PHILIPS).
BU208(A)
Silicon NPNnpn transistors,pnp transistors,transistors
Category: N
 PN Transistor, Transistor
PN Transistor, TransistorMHz: <1 MHz
Amps: 5A
Volts: 1500V
HIGH VOLTAGE CAPABILITY
JEDEC TO-3 METAL CASE.
DESCRIPTION
The BU208A, BU508A and BU508AFI are
manufactured using Multiepitaxial Mesa
technology for cost-effective high performance
and use a Hollow Emitter structure to enhance
switching speeds.
APPLICATIONS:
* HORIZONTAL DEFLECTION FOR COLOUR TV With 110° or even 90° degree of deflection angle.
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit
VCES Collector-Emit ter Voltage (VBE = 0) 1500 V
VCEO Collector-Emit ter Voltage (IB = 0) 700 V
VEBO Emitter-Base Voltage (IC = 0) 10 V
IC Collector Current 8 A
ICM Collector Peak Current (tp < 5 ms) 15 A
TO - 3 TO - 218 ISOWATT218
Ptot Total Dissipation at Tc = 25 oC 150 125 50 W
Tstg Storage Temperature -65 to 175 -65 to 150 -65 to 150 oC
Tj Max. Operating Junction Temperature 175 150 150 °C
The POWER SUPPLY Control UNIT is developed around the PHILIPS TDA2640.
"Television Switched-Mode Power Su
 pply Using the TDA2640", Mullard Technical Communications, L. M. White, pp. 258-279, Jul. 1975.
pply Using the TDA2640", Mullard Technical Communications, L. M. White, pp. 258-279, Jul. 1975.
What is claimed is:
1. A control circuit for a switched-mode power supply, said power supply comprising a non-regulated rectified DC voltage source, a driver transistor, a first transformer having primary and secondary windings, an end of said primary being coupled to the collector-emitter path of said driver transistor, a switching transistor having a base coupled to said secondary, a second transformer having a primary winding coupled in series with said switching transistor, and a plurality of secondary windings, said control circuit comprising a first additional transistor having a collector coupled to the remaining end of the primary winding of the first transformer not connected to the driver-transistor and an emitter coupled to the non-regulated direct voltage source.
 2. A control circuit as claimed in claim 1, further comprising a constant voltage source coupled to the base of the additional transistor.
2. A control circuit as claimed in claim 1, further comprising a constant voltage source coupled to the base of the additional transistor.
3. A control circuit as claimed in claim 1, further comprising a constant current source, and a resistor coupled between the emitter of the additional transistor and the constant current source.
4. A control circuit as claimed in claim 3, wherein the constant current source comprises a second additional transistor, the two additional transistors being of complementary conductivity and their emitters being connected with each other through said resistor, the collector of the second additional transistor being coupled to the non-regulated rectified direct voltage source and the collector of the first additional transistor being coupled to the end of the primary winding of the first transformer not connected to the driver transistor.
5. A control circuit as claimed in claim 4, further comprising a resistor coupled in series with the collector circuit of said second additional transistor and the non-regulated rectified direct voltage source.
 6. A control circuit as claimed in claim 5, further comprising a zener diode coupled between the base of the second additional transistor and the non-regulated voltage source.
6. A control circuit as claimed in claim 5, further comprising a zener diode coupled between the base of the second additional transistor and the non-regulated voltage source.
7. A control circuit as claimed in claim 6, further comprising a resistance bridge coupled to the base of the first additional transistor and arranged between the two electrodes of the zener diode.
8. A control circuit as claimed in claim 7, wherein the driver transistor and the switching transistor do not conduct simultaneously, and the voltage be tween the two electrodes of the zener diode as well as the values of the resistors arranged between the said electrodes and of the resistor arranged between the emitters of the two additional transistors are chosen so that the first additional transistor is in the saturated state at the lowest value of the non-regulated voltage while it operates in the linear state at a higher value of said non-regulated voltage.
tween the two electrodes of the zener diode as well as the values of the resistors arranged between the said electrodes and of the resistor arranged between the emitters of the two additional transistors are chosen so that the first additional transistor is in the saturated state at the lowest value of the non-regulated voltage while it operates in the linear state at a higher value of said non-regulated voltage.
1. A control circuit for a switched-mode power supply, said power supply comprising a non-regulated rectified DC voltage source, a driver transistor, a first transformer having primary and secondary windings, an end of said primary being coupled to the collector-emitter path of said driver transistor, a switching transistor having a base coupled to said secondary, a second transformer having a primary winding coupled in series with said switching transistor, and a plurality of secondary windings, said control circuit comprising a first additional transistor having a collector coupled to the remaining end of the primary winding of the first transformer not connected to the driver-transistor and an emitter coupled to the non-regulated direct voltage source.
3. A control circuit as claimed in claim 1, further comprising a constant current source, and a resistor coupled between the emitter of the additional transistor and the constant current source.
4. A control circuit as claimed in claim 3, wherein the constant current source comprises a second additional transistor, the two additional transistors being of complementary conductivity and their emitters being connected with each other through said resistor, the collector of the second additional transistor being coupled to the non-regulated rectified direct voltage source and the collector of the first additional transistor being coupled to the end of the primary winding of the first transformer not connected to the driver transistor.
5. A control circuit as claimed in claim 4, further comprising a resistor coupled in series with the collector circuit of said second additional transistor and the non-regulated rectified direct voltage source.

7. A control circuit as claimed in claim 6, further comprising a resistance bridge coupled to the base of the first additional transistor and arranged between the two electrodes of the zener diode.
8. A control circuit as claimed in claim 7, wherein the driver transistor and the switching transistor do not conduct simultaneously, and the voltage be
tween the two electrodes of the zener diode as well as the values of the resistors arranged between the said electrodes and of the resistor arranged between the emitters of the two additional transistors are chosen so that the first additional transistor is in the saturated state at the lowest value of the non-regulated voltage while it operates in the linear state at a higher value of said non-regulated voltage.
Description:
The present invention relates to a control circuit for a switched-mode power supply, particularly in a television receiver, said power supply comprising a rectified, non-regulated rectified DC voltage source, a driver transistor whose collector-emitter path is arranged in series with a primary winding of a first transformer, a secondary winding of the latter being coupled to the base of a switching transistor which is arranged in series with a primary winding of a second transformer having a plurality of secondary windings. This type of switched-mode power supply is used more and more because of the numerous advantages it presents as regards energy efficiency, reliability, compactness, etc. However, as for the majority of the other types of power supplies, its operation on mains supplies of different voltages imposes the use of either a transformer with taps or switch-over from full wave rectification at the highest mains voltage to a voltage doubler rectification for the lowest mains voltage.
However, the importance of having a power supply which can operate without any switching on mains supplies of 110 or 220 V is evident: for the manufacturer it is cheaper to produce and the reliability is increased; while the user does not run the risk of incorrect manipulations, particularly when the power supply is destined for use in portable television sets.
One of the objects of the invention is to realize a control circuit which permits the switched-mode power supply to operate without switching in conditions which are substantially optimum and in the presence of mains voltage variations in the range of 90 to 250 Volts.
A further object of the invention is to ensure that said IC/IB ratio of the switching transistor has a predetermined and, more particularly a constant value at the turn-off moment whatever the value of the mains voltage applied to the power supply.
The control circuit according to the invention is characterized in that the end of the primary winding of the first transformer not connected to the driver transistor is connected to the collector of an additional transistor whose emitter is coupled with the non-regulated direct voltage source. Advantageously it is characterized in that the emitter of the additional transistor is connected to one end of a resistor, the other end of this resistor being conne
cted to a constant current source, and that the constant current source is constituted by a second additional transistor, the two additional transistors being of complementary conductivity and their emitters being connected with each other through a resistor, whilst the collector of the second additional transistor is connected to one of the poles of the non-regulated rectified direct voltage source and the collector of the first additional transistor is connected to the end of the primary winding of the first transformer not connected to the driver transistor. Whilst combining the action of a ballast transistor with that of a variable current generator, the circuit according to the invention thus maintains automatically a desired IC/IB ratio of the switching transistor whatever the value of the mains voltage applied to the power supply.
 CRT Line Output Stage Operation Principle:
CRT Line Output Stage Operation Principle: I'll examine the operation of the line output stage, whose basic job is to generate a sawtooth current in the line scan coils so that the beams are deflected horizontally across the picture tube's screen. The beams are deflected from the left-hand side to the right-hand side to give the forward line scan: this is followed by a rapid, blanked flyback to the left-hand side ready to trace out the next viewed line. Because of the way in which the flyback is achieved, the line output transformer generates various pulse voltages which are rectified to produce the e.h.t. required by the tube and other supplies. The line output stage is not just any sort of amplifier. The active device, almost always a transistor though valves, thyristors and gate -controlled switches have been used in the past, operates as a switch, the inductive components in the stage being mainly responsible for generating the sawtooth current waveform. Tuning is used to generate and control the flyback. The line drive waveform controls the output transistor's on/off switching and thus determines the timing of the cycle of operations, keeping them phase synchronised with the transmitted picture signal.
Basic Operation
Fig. 1 shows in most basic form the main elements in the line output stage, the active device (transistor) being shown as a switch. When the switch is closed, capacitor C and diode D are shorted out and the 150V supply is connected across coil L. Now it's a basic law of inductance that when a d.c. voltage is connected across a coil the current flowing through the coil builds up linearly from zero. Fig. 2(a) shows this as a positive -going ramp that starts at time t 1 , when the switch is closed. After about 26psec (t2), roughly the time required to deflect the beams from screen centre flows via the large -value capacitor CR, charging the tuning capacitor C with the result that the voltage at its 'upper' plate (the one connected to the coil) rises to a relatively high positive value. When all the energy in coil L has been transferred to capacitor C (time t3) the latter begi
 ns
to discharge, passing the energy back the other way to L via CR which,
as far as the circuit's a.c. operation is concerned, can be regarded as a
short-circuit. At time t4 the capacitor has discharged, having
transferred the energy back to the coil. This to-and-fro interchange of
energy between L and C, which from the a.c. point of view are in
parallel (CR representing a short-circuit), is the normal action of a
tuned/resonant/oscillatory circuit. The resonant frequency is determined
by the values of L and C. These are selected so that when time t4 is
reached, i.e. after a half cycle of oscillation, the sawtooth current
has passed through zero to a negative point on the ramp and the beams
have been deflected to the left-hand side of the screen ready for the
next active line scan. To complete the oscillatory cycle (the normal
resonant circuit action) the voltage at the upper plate of capacitor C
would have to move negatively with respect to chassis. It can't do so
because of the presence of diode D, which is called the efficiency diode
- we'll explain that in a minute. When the voltage at the cathode of D
tries to swing negatively it conducts, i.e. switches on, providing a
discharge path for the coil. Once again because of the inductance in the
circuit there's a gradual, linear current discharge, the enegery being
returned to the supply's reservoir capacitor CR. During this discharge,
the beams are deflected back towards the centre of the screen (times t4
to t5). At this point the magnetic flux (energy) in L has been
dissipated. C is still in its discharged state, being shorted out by
diode D. So at time t5, with the beams at screen centre (zero
deflection), the switch has to be closed so that the cycle of operation
can be repeated. The action of diode D has, with the inductance in the
circuit, provided half the scan power while in the process returning the
energy (minus inevitable circuit losses) to the reservoir capacitor. No
wonder it's called the efficiency diode. It's important to note that
the beam flyback period t2 to t4 is governed by the time -constant of L
and C, consisting of one half cycle of oscillation. To achieve a flyback
time of 12μsec the duration of one cycle needs to be 24μsec: so the
resonant frequency of L and C works out at 41.67kHz. Fig. 3 illustrates
the four phases in the operation of the line output stage. Now the
voltage developed across an inductor is propor- tional to the rate of
change of the current flowing through it. Thus the voltage across L is
relatively low during the forward scan period but correspondingly high
during the flyback, when the current flow is faster because of the
circuit resonance. The voltage developed at the positive plate of
capacitor C is shown in Fig. 2(b), typically peaking at 1,200V. Both the
line output transistor and the efficiency diode must be capable of
withstanding this high reverse voltage. As we've seen, the circuit
action is highly efficient as the energy stored in L is returned to the
supply during the first half of the forward scan: indeed with 'perfect'
components there would be no net demand on the power supply at all! In
practice because of the resistance of the inductor and the losses in the
diode, switch and capacitor the circuit takes out a little more than it
puts back, while the practice of loading the transformer with rectifier
circuits to provide power for other sections of the set increases the
stage's current demand. To make up for these losses, the line output
transistor is switched on slightly before instead of at the centre of
the forward scan. In a practical circuit L is the primary winding of the
line output transformer and the deflection coils are connected across
it via a d.c. blocking capacitor, CB, as shown in Fig. 4. This coupling
capacitor also provides scan -correction (often referred to as S
-correction). Why is this required? If a linear deflection current was
used to control the scanning with a relatively flat -faced picture tube
the sides of the picture would be stretched out in comparison with the
centre section. Hence S -correction: the value of the coupling capacitor
is chosen so that it resonantes with the inductance of the scan coils
at about 5kHz. This has the effect of adding a sinewave component to the
sawtooth current, as shown in
Fig. 5. Thus the deflection power is tailored to suit the length of the
beam paths as the screen is scanned, correcting the horizontal
linearity of the display. At the line scanning frequency the scan coils
behave as an almost perfect inductor, but their small d.c. resistance is
in series with the fixed voltage that should be present across the
coil. It has the effect of introducing an asymmetric sensitivity loss
during the forward scan. To counteract it a further component is added
in series with the scan coils - an inductor with a saturable magnetic
core, biased by a permanent magnet so that its inductance falls as the
scan current increases. The voltage drop across this inductor, which is
known as the linearity coil, varies in the opposite sense to that
produced by the resistance of the coils, thus providing an equal -but
-opposite cancellation effect. In some TV sets the permanent magnet can
be adjusted to trim the linearity correction, though many modern sets
use components with such tight tolerances that a sealed linearity
-correction coil can be used. With some very small -screen sets the
horizontal non -linearity effect is small enough to be ignored.
ns
to discharge, passing the energy back the other way to L via CR which,
as far as the circuit's a.c. operation is concerned, can be regarded as a
short-circuit. At time t4 the capacitor has discharged, having
transferred the energy back to the coil. This to-and-fro interchange of
energy between L and C, which from the a.c. point of view are in
parallel (CR representing a short-circuit), is the normal action of a
tuned/resonant/oscillatory circuit. The resonant frequency is determined
by the values of L and C. These are selected so that when time t4 is
reached, i.e. after a half cycle of oscillation, the sawtooth current
has passed through zero to a negative point on the ramp and the beams
have been deflected to the left-hand side of the screen ready for the
next active line scan. To complete the oscillatory cycle (the normal
resonant circuit action) the voltage at the upper plate of capacitor C
would have to move negatively with respect to chassis. It can't do so
because of the presence of diode D, which is called the efficiency diode
- we'll explain that in a minute. When the voltage at the cathode of D
tries to swing negatively it conducts, i.e. switches on, providing a
discharge path for the coil. Once again because of the inductance in the
circuit there's a gradual, linear current discharge, the enegery being
returned to the supply's reservoir capacitor CR. During this discharge,
the beams are deflected back towards the centre of the screen (times t4
to t5). At this point the magnetic flux (energy) in L has been
dissipated. C is still in its discharged state, being shorted out by
diode D. So at time t5, with the beams at screen centre (zero
deflection), the switch has to be closed so that the cycle of operation
can be repeated. The action of diode D has, with the inductance in the
circuit, provided half the scan power while in the process returning the
energy (minus inevitable circuit losses) to the reservoir capacitor. No
wonder it's called the efficiency diode. It's important to note that
the beam flyback period t2 to t4 is governed by the time -constant of L
and C, consisting of one half cycle of oscillation. To achieve a flyback
time of 12μsec the duration of one cycle needs to be 24μsec: so the
resonant frequency of L and C works out at 41.67kHz. Fig. 3 illustrates
the four phases in the operation of the line output stage. Now the
voltage developed across an inductor is propor- tional to the rate of
change of the current flowing through it. Thus the voltage across L is
relatively low during the forward scan period but correspondingly high
during the flyback, when the current flow is faster because of the
circuit resonance. The voltage developed at the positive plate of
capacitor C is shown in Fig. 2(b), typically peaking at 1,200V. Both the
line output transistor and the efficiency diode must be capable of
withstanding this high reverse voltage. As we've seen, the circuit
action is highly efficient as the energy stored in L is returned to the
supply during the first half of the forward scan: indeed with 'perfect'
components there would be no net demand on the power supply at all! In
practice because of the resistance of the inductor and the losses in the
diode, switch and capacitor the circuit takes out a little more than it
puts back, while the practice of loading the transformer with rectifier
circuits to provide power for other sections of the set increases the
stage's current demand. To make up for these losses, the line output
transistor is switched on slightly before instead of at the centre of
the forward scan. In a practical circuit L is the primary winding of the
line output transformer and the deflection coils are connected across
it via a d.c. blocking capacitor, CB, as shown in Fig. 4. This coupling
capacitor also provides scan -correction (often referred to as S
-correction). Why is this required? If a linear deflection current was
used to control the scanning with a relatively flat -faced picture tube
the sides of the picture would be stretched out in comparison with the
centre section. Hence S -correction: the value of the coupling capacitor
is chosen so that it resonantes with the inductance of the scan coils
at about 5kHz. This has the effect of adding a sinewave component to the
sawtooth current, as shown in
Fig. 5. Thus the deflection power is tailored to suit the length of the
beam paths as the screen is scanned, correcting the horizontal
linearity of the display. At the line scanning frequency the scan coils
behave as an almost perfect inductor, but their small d.c. resistance is
in series with the fixed voltage that should be present across the
coil. It has the effect of introducing an asymmetric sensitivity loss
during the forward scan. To counteract it a further component is added
in series with the scan coils - an inductor with a saturable magnetic
core, biased by a permanent magnet so that its inductance falls as the
scan current increases. The voltage drop across this inductor, which is
known as the linearity coil, varies in the opposite sense to that
produced by the resistance of the coils, thus providing an equal -but
-opposite cancellation effect. In some TV sets the permanent magnet can
be adjusted to trim the linearity correction, though many modern sets
use components with such tight tolerances that a sealed linearity
-correction coil can be used. With some very small -screen sets the
horizontal non -linearity effect is small enough to be ignored.Practical Line Output Stage

Fig. 6 shows a relatively simple line output stage circuit used with a 90° -deflection tube. Tr5 is the line output transistor, which incorporates the efficiency diode in the same package. The primary winding of the line output trans- former T4 is the section between pins 2 and 10, C95 being the flyback tuning capacitor. Scan coil coupling and S - correction are provided by C94, the line linearity coil L14 being connected in series on the chassis side of the scan current path. L14 is damped by R110 to prevent it ringing when the line flyback pulse occurs - the effect of an undamped linearity coil is velocity modulation of the beams at the beginning of their sweeps, showing up as black -and - white vertical striations at the left-hand side of the screen. C92 is the reservoir capacitor, the h.t. feed being via 8105. 8106 and R109 feed pulses to the second phase -locked loop (APC2) in the sync chip - we dealt with this in last month's instalment. A second pulse feed from the same point goes to the colour decoder chip to provide line blanking, burst gating and PAL switch drive - this particular set doesn't use the sandcastle pulse approach.
Secondary Supplies
So much for the generation and control of the sawtooth scanning current. The rest of the components in this circuit are used to harness the energy in the transformer to provide power supplies for other sections of the receiver. The winding between pins 4 and 8 pulse energises the picture tube's heaters at 6.3V r.m.s. The other supplies make use of the transformer as the heart of a d.c.-to-d.c. converter system, by means of secondary windings that provide pulse feeds to diode/capacitor rectifier circuits. Small -value (0.680) resistors in the 25V and 200V supplies provide surge limiting and protection (by going open -circuit) in the event of a short-circuit in one of these supplies. The most significant supply is obtained from the diode - split winding that starts at pin 9. Although not shown in full detail it consists of several 'cells', each of which consists of an electrically isolated secondary winding, a built-in high - voltage rectifier diode and, as the reservoir capacitor, the carefully contrived capacitance that's present between adjacent, highly -insulated winding layers. These cells are connected in series to form a voltage -multiplier system capable of providing an e.h.t. supply for the tube's final anode of typically 24kV - it may be as high as 30kV in some designs. There's a built-in surge limiter resistor at the output end of the chain of cells. An important part of the e.h.t. multiplier system is the final reservoir capacitor that split chain provides about 8kV to a built-in potential -divider chain that contains two pres
ets:
the one at the top provides the supply for the tube's focus electrode
while the one near the bottom provides its first anode supply of about
800V. The bottom of the diode -split chain (pin 9) is returned to
chassis via a diode/capacitor/resistor network (not shown here). The
voltage developed across this network is proportional to the total beam
current, since this flows from the tube's cathodes via the e.h.t.
connector and the diode -split chain to chassis. Above a certain
threshold the voltage at pin 9 reduces the picture brightness and/or
contrast via the colour decoder/matrixing chip, limiting the beam
current and hence the dissipation in the tube's shadowmask to safe
levels. The winding between pins 10 and 7 of the transformer produces
50-70V pulses that sit on the h.t. voltage present at pin 10. When
rectified by D23 and C100 a 200V supply is provided for the RGB output
stages that drive the tube's cathodes. Secondary winding 4-6 feeds D24
and C99 which provide a 25V supply for the field timebase. In some
designs supplies for the audio output stage and the signal sections of
the receiver are also obtained from the line output transformer: in this
particular chassis they are obtained from the chopper transformer in
the power supply instead. Incidentally there have been one or two
designs, the Ferguson/philco TX10 chassis being a well-known example,
where the e.h.t. is also obtained from the chopper transformer, the line
output transformer then acting mainly as a load for the line output
transistor. In earlier designs a separate diode - capacitor multiplier
unit (tripler) was fed from a single line output transformer overwiding
to provide the e.h.t.Scan Rectification
The e.h.t., focus and 200V supplies d
erived
from the transformer are relatively lightly loaded, i.e. no great
current demand is placed on them. They can therefore be obtained by
rectifying the pulses present during the flyback period (time t2 -t4 in
Fig. 2), which is about twenty per cent of the scan cycle. Where the
current demand is greater, e.g. in a supply for the field timebase or an
audio output stage, the phasing of the relevant transformer winding is
often arranged so that the rectifier diode conducts during the scan
rather than the flyback period. Although the voltage available is much
lower, it's present for a longer period (about eighty per cent of the
scan/duty cycle). As a result the output regulation is much better. The
relatively high peak reverse voltage has to be taken into account in the
rectifier diode's specification.EHT Regulation
The internal impedance of a diode -sp
lit
e.h.t. supply is typically about 1MOhm. Thus with a total beam current
of lmA, present when a bright picture is being displayed on a 22in.
picture tube, the e.h.t. voltage will drop by about 1kV or five per
cent. The result of this is some ballooning, i.e. increase in picture
size. Compensation can be provided by reducing the line scanning power.
Careful choice of the value of the resistor that feeds the line output
transformer - R105 in Fig. 6 - gives automatic compensation in the
horizontal direction, while deriving the supply for the field output
stage from the line output transformer tends to cancel out the
ballooning in the vertical plane. Various 'anti -breathing' arrangements
are used in TV receiver design. Most operate via the diode -modulator
circuit we'll come to shortly. With any line output stage circuit the
picture width and e.h.t. voltage depend on the stage's h.t. supply, so
this must be well regulated and set up correctly. In the circuit shown
in Fig. 6 the h.t. voltage has to be 119V with a 20in. tube and 145V
with a 22in. tube.Pincushion Distortion
The raster produced on an almost -flat faced picture tube by constant -amplitude scan currents has pincushion distortion at all four sides. This is because of the disparity between the image plane and the screen's profile - . As a general rule the deflection yokes used with modern 90° tubes have built-in correction for both NS (vertical) and EW (horizontal) pincushion distortion while 110° tubes (generally above 22in. screen size) have in -yoke correction for NS distortion but cannot fully compensate for the
 pincushion
effect at the sides of the screen. Thus with these the line scan
current has to be amplitude -modulated by a parabolic waveform at field
frequency as shown in Fig. 7. With present-day tube designs a modulation
depth of about seven per cent is required. the peak -to -peak scan
current being typically 4.1A at the top and bottom of the screen and
4.4A towards the centre of the screen, where the deflection power is
greatest. Amplitude modulation of the line scan current can be achieved
by including a saturable -reactance transformer in series with the scan
coils, but this is expensive. You could put a suitably -shaped ripple on
the supply to the line output stage, but the parabola would be
superimposed on any secondary supplies derived from the line output
transformer. The most widely used solution is to employ a diode -modu-
lator circuit, since this gives full control of the raster shape and
scan amplitude while providing a constant load current and flyback time.
pincushion
effect at the sides of the screen. Thus with these the line scan
current has to be amplitude -modulated by a parabolic waveform at field
frequency as shown in Fig. 7. With present-day tube designs a modulation
depth of about seven per cent is required. the peak -to -peak scan
current being typically 4.1A at the top and bottom of the screen and
4.4A towards the centre of the screen, where the deflection power is
greatest. Amplitude modulation of the line scan current can be achieved
by including a saturable -reactance transformer in series with the scan
coils, but this is expensive. You could put a suitably -shaped ripple on
the supply to the line output stage, but the parabola would be
superimposed on any secondary supplies derived from the line output
transformer. The most widely used solution is to employ a diode -modu-
lator circuit, since this gives full control of the raster shape and
scan amplitude while providing a constant load current and flyback time.The Diode Modulator

Fig. 8 shows the essence of a diode -modulator arrange- ment. The efficiency diode is split in two, DI and D2, which perform the same clamping action as before. The flyback tuning capacitor is also split in two, Cl and C2: the upper one tunes the transformer and scan coils (L1) as before while the lower one tunes a bridge coil, L2, via C4 to the same flyback frequency of about 42kHz. C3 is the scan coupling capacitor, which corresponds with CB in Fig. 4. Modulation is achieved by using transistor Tr2, whose conduction governs the scan width, to vary the load across C4. When Tr2 is off, the scan energy is shared between the the two series LC combinations C3/L1 and L2/C4. The charge on C3 and C4 is in the ratio of about 7:1, the scan current being reduced in proportion. When Tr2 is fully conductive, C4 is effectively shorted out and acquires no charge. Thus a greater proportion of the energy is present in C3/L1 and the scan current and picture width are increased. By varying the conduction of Tr2 during the forward scan in a parabolic manner, EW pincushion correction is achieved. The basic picture width can be controlled by varying Tr2's standing bias. Choke L3 and the large -value capacitor
C5
filter the line -frequency energy so that it doesn't reach Tr2. And
because both sections of the load (L 1/C1 and L2/C2) are individually
tuned to the flyback frequency the flyback time, and hence the e.h.t.
and the other line output transformer -derived supplies, remain constant
over the field period despite the line scan current variation. There
are several different versions of the diode -modu- lator arrangement.
Some tube/yoke combinations have a scan -geometry characteristic such
that when the line scan current is modulated by a simple parabolic
waveform as described above the raster has inner pincushion distortion
as shown in Fig. 9.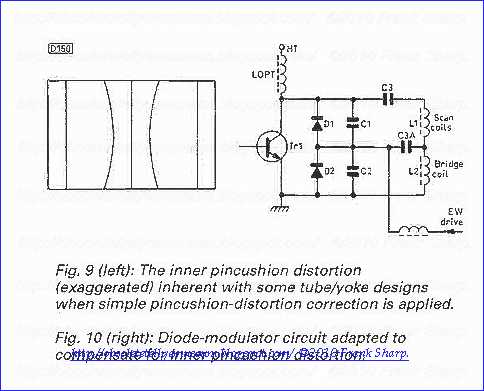 Because
of this. the EW-correction system also has to modulate the S
-correction. Fig. 10 shows, in skeleton circuit form. how this can be
done. There are two coupling/S-correction capacitors. C3 and C3A. C3 is
the usual S -correction capacitor, but C3A has an increasing influence
as the diode modulator begins to have maximum effect towards the centre
of the screen. Critical choice of the value of C3A ensures that the
inner curved verticals shown in Fig. 9 are straightened out to give a
raster completely free from geometric distortion. Although all diode
modulators work on the same basic principle, in some designs a
transformer is used in place of the bridge coil to give better impedance
matching and balance. Fig. 11 shows such an arrangement, used by Bang
and Olufsen. The EW correction waveform is applied to transformer T6.
whose winding 1-2 takes the place of L2 in Figs. 8 and 10. This circuit
also provides inner -pincushion distortion correction as just described,
the supplementary S - correction capacitor being C36.
Because
of this. the EW-correction system also has to modulate the S
-correction. Fig. 10 shows, in skeleton circuit form. how this can be
done. There are two coupling/S-correction capacitors. C3 and C3A. C3 is
the usual S -correction capacitor, but C3A has an increasing influence
as the diode modulator begins to have maximum effect towards the centre
of the screen. Critical choice of the value of C3A ensures that the
inner curved verticals shown in Fig. 9 are straightened out to give a
raster completely free from geometric distortion. Although all diode
modulators work on the same basic principle, in some designs a
transformer is used in place of the bridge coil to give better impedance
matching and balance. Fig. 11 shows such an arrangement, used by Bang
and Olufsen. The EW correction waveform is applied to transformer T6.
whose winding 1-2 takes the place of L2 in Figs. 8 and 10. This circuit
also provides inner -pincushion distortion correction as just described,
the supplementary S - correction capacitor being C36.Diode Modulator Drive

The parabolic EW drive waveform required is easily obtained by feeding the field -scan sawtooth waveform to a double integrator. By adding a sawtooth component the shape of the parabolic waveform can be tilted in either direction to give keystone -distortion correction if required - this is not generally necessary with modern tube/yoke designs. These EW correction characteristics are adjustable by preset resistors or, in the case of bus -programmable sets, remote control commands to the deflection processor. Very often the EW modulator is used to correct the previously mentioned picture breathing effect: this is done by feeding to the EW modulator's control circuit a voltage that's proportional to beam current.
Chrominance + Luminance with TDA3561A,
GENERAL DESCRIPTION
The TDA3561A is a dec
and demodulation of PAL signals. Furthermore it contains a luminance amplifier, an RGB-matrix and amplifier. These
amplifiers supply output signals up to 5 V peak-to-peak (picture information) enabling direct drive of the discrete output
stages. The circuit also contains separate inputs for data insertion, analogue as well as digital, which can be used for
text display systems (e.g. (Teletext/broadcast antiope), channel number display, etc. Additional to the TDA3560, the
circuit includes the following features:
· The peak white limiter is only active during the time that the 9,3 V level at the output is exceeded. The start of the limiting function is delayed by one line period. This avoids peak white limiting by test patterns which have abrupt
transitions from colour to white signals.
· The brightness control is obtained by inserting a variable pulse in the luminance channel. Therefore the ratio of
brightness variation and signal amplitude at the three outputs will be identical and independent of the difference in gain
of the three channels. Thus discolouring due to adjustment of contrast and brightness is avoided.
· Improved suppression of the internal RGB signals when the device is switched to external signals, and vice versa.
· Non-synchronized external RGB signals do not disturb the black level of the internal signals.
· Improved suppression of the residual 4,4 MHz signal in the RGB output stages.
· Cascoded stages in the demodulators and burst phase detector minimize the radiation of the colour demodulator
inputs.
· High current capability of the RGB outputs and the chrominance output.
APPLICATION INFORMATION
The function is described against the corresponding pin
number.
1. + 12 V power supply
The circuit gives good operation in a supply voltage range
between 8 and 13,2 V provided that the supply voltage for
the controls is equal to the supply voltage for the
TDA3561A. All signal and control levels have a linear
dependency on the supply voltage. The current taken by
the device at 12 V is typically 85 mA. It is linearly
dependent on the supply voltage.
2. Control voltage for identification
correct operation. The voltages available under various
signal conditions are given in the specification.
3. Chrominance input
The chroma signal must be a.c.-coupled to the input.
Its amplitude must be between 55 mV and 1100 mV
peak-to-peak (25 mV to 500 mV peak-to-peak burst
signal). All figures for the chroma signals are based on a
colour bar signal with 75% saturation, that is the
burst-to-chroma ratio of the input signal is 1 : 2,25.
4. Reference voltage A.C.C. detector
This pin must be decoupled by a capacitor of about 330
nF. The voltage at this pin is 4,9 V.
5. Control voltage A.C.C.
The A.C.C. is obtained by synchronous detection of the
burst signal followed by a peak detector. A good noise
immunity is obtained in this way and an increase of the
colour for weak input signals is prevented. The
recommended capacitor value at this pin is 2,2 mF.
6. Saturation control
The saturation control range is in excess of 50 dB.
The control voltage range is 2 to 4 V. Saturation control is
a linear function of the control voltage.
When the colour killer is active, the saturation control
voltage is reduced to a low level if the resistance of the
external saturation control network is sufficiently high.
Then the chroma amplifier supplies no signal to the
demodulator. Colour switch-on can be delayed by proper
choice of the time constant for the saturation control
setting circuit.
When the saturation control pin is connected to the power
supply the colour killer circuit is overruled so that the colour
signal is visible on the screen. In this way it is possible to
adjust the oscillator frequency without using a frequency
counter (see also pins 25 and 26).
7. Contrast control
The contrast control range is 20 dB for a control voltage
change from + 2 to + 4 V. Contrast control is a linear
function of the control voltage. The output signal is
suppressed when the control voltage is 1 V or less. If one
or more output signals surpasses the level of 9 V the peak
white limiter circuit becomes active and reduces the output
signals via the contrast control by discharging C2 via an
internal current sink.
8. Sandcastle and field blanking input
The output signals are blanked if the amplitude of the input
pulse is between 2 and 6,5 V. The burst gate and clamping
circuits are activated if the input pulse exceeds a level of
7,5 V.
The higher part of the sandcastle pulse should start just
after the sync pulse to prevent clamping of video signal on
the sync pulse. The width should be about 4 ms for proper
A.C.C. operation.
9. Video-data switching
an input pulse between 1 V and 2 V. In that condition, the
internal RGB signals are switched off and the inserted
signals are supplied to the output amplifiers. If only normal
operation is wanted this pin should be connected to the
negative supply. The switching times are very short
(< 20 ns) to avoid coloured edges of the inserted signals
on the screen.
10. Luminance signal input
The input signal should have a peak-to-peak amplitude of
0,45 V (peak white to sync) to obtain a black-white output
signal to 5 V at nominal contrast. It must be a.c.-coupled to
the input by a capacitor of about 22 nF. The signal is
clamped at the input to an internal reference voltage.
A 1 kW luminance delay line can be applied because the
luminance input impedance is made very high.
Consequently the charging and discharging currents of the
coupling capacitor are very small and do not influence the
signal level at the input noticeably. Additionally the
coupling capacitor value may be small.
11. Brightness control
The black level of the RGB outputs can be set by the
voltage on this pin (see Fig.5). The black level can be set
higher than 4 V however the available output signal
amplitude is reduced (see pin 7). Brightness control also
operates on the black level of the inserted signals.
12, 14, 16. RGB outputs
The output circuits for red, green and blue are identical.
Output signals are 5,25 V (R, G and B) at nominal input
signals and control settings. The black levels of the three
outputs have the same value. The blanking level at the
outputs is 2,1 V. The peak white level is limited to 9,3 V.
When this level exceeded the output signal amplitude is
reduced via the contrast control (see pin 7).
13, 15, 17. Inputs for external RGB signals
The external signals must be a.c.-coupled to the inputs via
a coupling capacitor of about 100 nF. Source impedance
should not exceed 150 W. The input signal required for
a 5 V peak-to-peak output signal is 1 V peak-to-peak.
At the RGB outputs the black level of the inserted signal is
identical to that of normal RGB signals. When these inputs
are not used the coupling capacitors have to be connected
to the negative supply.
18, 19, 20. Black level clamp capacitors
The black level clamp capacitors for the three channels are
connected to these pins. The value of each capacitor
should be about 100 nF.
21, 22. Inputs (B-Y) and (R-Y) demodulators
The input signal is automatically fixed to the required level
by means of the burst phase detector and A.C.C.
generator which are connected to pin 21 and pin 22. As the
burst (applied differentially to those pins) is kept constant
by the A.C.C., the colour difference signals automatically
have the correct value.
23, 24. Burst phase detector outputs
At these pins the output of the burst phase detector is
filtered and controls the reference oscillator. An adequate
catching range is obtained with the time constants given in
the application circuit (see Fig.6).
25, 26. Reference oscillator
The frequency of the oscillator is adjusted by the variable
capacitor C1. For frequency adjustment interconnect pin
21 and pin 22. The frequency can be measured by
connecting a suitable frequency counter to pin 25.
28. Output of the chroma amplifier
Both burst and chroma signals are available at the output.
The burst-to-chroma ratio at the output is identical to that
at the input for nominal control settings. The burst signal is
not affected by the controls. The amplitude of the input
signal to the demodulator is kept constant by the A.C.C.
Therefore the output signal at pin 28 will depend on the
signal loss in the delay line.
BRIONVEGA COSMO TVC 26 MONITOR PANSOUND CHASSIS 509 30AX Frequency synthesizer tuning system for television receivers:
" A method for tuning a television receiver having automatic frequency control to the carrier frequency of a selected broadcast channel with an associated channel number including generating a variable frequency signal by means of a local oscillator, generating a reference frequency signal by means of a reference oscillator, and generating a local oscillator correction signal for matching an intermediate frequency signal derived from said local oscillator signal and the carrier frequency signal with a predetermined nominal intermediate frequency signal, said method being characterized by the use of a microcomputer and comprising:- Remote Control Decoding by Microprocessor.
- 32 Station Non-Volatile Memory or 30 Station
- Memory + Normalized D/A Positions
- Flexible System Operation
- Frequency Synthesis of all Standard and CATV
Channels
- Direct Channel Selection
- ± 4MHz Fine Tuning (62.5kHz per Step)
- Automatic Search within Channel
(using TDA4433)
- AFC Operation
(using TDA4433)
- 6 D/A Converters
- Teletext and Viewdata Data Bus Conversion.Frequency Synthesis as described in the Basic Configuration with the addition of :
- Further Station Memory, using M120, 1 K NV MEMORY
- Clock and programmable timer for automatic switch ON/OFF, using M755.
M3872 + M206
M206 PLL TV MICROCOMPUTER INTERFACE:
.HIGHLY INTEGRATED SOLUTION INCLUDING PLL SYNTHESIZER, NV MEMORY, D/A
CONVERTERS, BAND SELECT OUTPUTS,CLOCK OSCILLATOR, IR SIGNAL PREPROCESSOR AND SERIAL BUS INTERFACE
.32 x 16 BITS OF NV MEMORY WITH LIFETIMES
OF 104 CYCLES/WORD AND MINIMUM 10 YEARS RETENTION STORES TUNING DATAFOR 30 CHANNELS PLUS PRESET VALUES FOR THE SIX ANALOG OUTPUTS
.PRE-PROCESSOR FOR INFRARED REMOTE CONTROL SIGNALS REDUCES COMPONENT COUNT
.SIX PWM D/A CONVERTERS WITH 64-STEP RESOLUTION
.FOUR OPEN-DRAIN BAND SELECT OUTPUTS RATED TO 13.2 V
.ON-CHIP 4 MHz CLOCK OSCILLATOR WITH BUFFERED OUTPUT
.INTEGRATED DIGITALPOWER-ON RESET .3-WIRE SERIAL BUS TO LOAD/READ INTERNAL REGISTERS
DESCRIPTION
The M206 is a highly integrated, programmable LSI
integrated circuit for microcomputer controlled TV
applications, realized using an advanced N-channel
double polysilicon gate technology (NVMOS)
that allows the integration of non-volatile memory
and standard logic on the same chip.
It contains a phase-locked loop (PLL) synthesizer,
six pulse-width modulation (PWM) digital/analog
converters, a four-bit parallel output buffer, clock
oscillator with buffered output, pre-processor for
infrared remote control signals and a 3-wire serial
bus interface.
The M206 interfaces with amicrocomputer through
the three-wire serial bus and is programmed by
loading thirteen internal registers - twelve of which
are readable to simplify programming.
The PLL synthesizer requires an external 64 +
15/16 prescalerand divider and works with a phase
comparator reference frequency of 0.9765 kHz.
Outputs are provided to control the division ratio of
the prescalerand to signal the out-of-lockcondition
to the microcomputer.
The infrared remote control signal pre-processor
consists of a preamplifier, a squarer and a digital
filter to separate noise from signals transmitted by
the M708, M709 and M710 remote control transmitters.
The output of this pre-processor is connected
to the interrupt input of a microcomputer
programmed to receive and decode the signal.
TheM206 is supplied with two separate 5 V supply
inputs, each provided with internal power-on reset
circuits. The first, VDD1, supplies the remote control
and clock circuits in both standby and TV set operation.
The second, VDD2, supplies the rest of the
circuits and is only active during TV operation.
The M206 is packaged in a 28-pin dual in-line
plastic package.
generating binary signals representing first and second digital tune words, said digital tune words representing a selected channel;
storing said first and second digital tune words in a first data memory in said microcomputer;
reading said first and second digital tune words from said first memory and generating a divided-down local oscillator frequency by the use of said first digital tune word and a divided-down reference oscillator frequency by the use of said second digital tune word;
comparing said divided-down local oscillator and reference frequencies and generating a control signal representative of the difference in frequency of said divided-down local oscillator and reference frequencies;
coupling said control signal to said local oscillator for causing it to be locked to the frequency of said received carrier signal;
mixing the local oscillator frequency signal and the carrier frequency signal to generate an intermediate frequency signal;
comparing said intermediate frequency signal with said predetermined nominal intermediate frequency signal and providing a tuning voltage to said microcomputer, said tuning voltage being indicative of the magnitude and direction of a tuning error between said intermediate frequency signal and said predetermined nominal intermediate frequency signal;
incrementally adjusting the reference oscillator frequency by means of a tuning signal provided to said reference oscillator by said microcomputer in response to said tuning voltage;
detecting when the incrementally changing, divided-down reference oscillator frequency causes the intermediate frequency signal to pass said predetermined nominal intermediate frequency signal; and
incrementally stepping the divided-down reference oscillator frequency back a predetermined number of steps following the passage of said predetermined nominal intermediate frequency signal by said intermediate frequency signal in tuning said television receiver to the selected channel.
"
A television tuning system employs a frequency synthesizer system for establishing the tuning of the receiver. A programmable frequency divider counter is connected between the output of a reference oscillator and a phase comparator to which the output of the local oscillator in the tuner also is applied. The phase comparator output provides a tuning voltage for controlling the tuning of the local oscillator. A microprocessor is used to control the count of the programmable frequency divider and initially to set a count corresponding to the selected channel in a counter connected between the output of the local oscillator and the phase comparator. The tuning consists of three discrete time periods. First, a settling time to allow channel change transients to settle; second, a short period of forced search at a relatively rapid rate to insure proper tuning; and third, a slower rate of step-by-step correction to accomodate for station drift and the like during reception. This third time period is initiated either by the passage of a fixed length of time following the start of the forced search period or by sensing a preestablished number of changes of state in the output of the frequency discriminator during the forced/search period.
1. A tuning system for the tuner of a television receiver capable of receiving a composite television signal and including frequency discriminator (AFT) circuit means, said system including in combination:
a reference oscillator providing a reference signal at a predetermined frequency;
a local oscillator in the tuner providing a variable output frequency in response to the application of a control signal thereto;
a programmable frequency divider means having first and second inputs coupled respectively to the output of said reference oscillator and said local oscillator for producing signals on first and second outputs having frequencies which are a programmable fraction of the frequency of the signals applied to the inputs thereto;
phase comparator means having one input coupled with the first output of said programmable frequency divider means and having another input coupled with the second output of said programmable frequency divider means for developing a control signal and applying such control signal to said local oscillator for controlling the output frequency thereof;
counter circuit means coupled with said p
rogrammable frequency divider means for initially setting said divider means to a predetermined division ratio and operating to change the programmable fraction of division thereof in accordance with changes in the count in said counter circuit means; control circuit means coupled with the output of said frequency discriminator means and further coupled with said counter circuit means for causing said counter circuit means to count at a first rate in a predetermined direction determined by the state of the output signal from said discriminator means in the absence of a predetermined signal output from said frequency discriminator means until a predetermined maximum count is attained, thereupon resetting said counter circuit means to a count which is a predetermined amount less than said maximum predetermined count and continuing to count at said first rate in the same predetermined direction from said new count to continuously change the programmable fraction of said frequency divider means in accordance with the state of operation of said counter circuit means, said control means operating in response to said predetermined signal output from the frequency discriminator means for terminating operation of said counter circuit means; and
further means for terminating operation of said counter circuit means at said first rate and causing operation thereof at a second slower rate.
2. The combination according to claim 1 wherein said further means includes timing means initiated into operation simultaneously with the setting of said divider means to a predetermined division ratio, and after a predetermined time interval said timing means producing an output signal applied to said counter circuit means to cause operation thereof to take place at said second slower rate. 3. The combination according to claim 1 wherein said counter circuit means includes a reversible digital counter coupled with said programmable frequency divider, means and said control circuit means causes said counter circuit means to count in said predetermined direction when the output of said frequency discriminator is of a first state and to count in the opposite direction when the output of said frequency discriminator is of second state; and said further means comprises means coupled with the output of said frequency discriminator and with said counter circuit means to take place at said second slower rate in response to a predetermined number of changes of state of frequency discriminator. 4. The combination according to claim 3 further including means responsive to the selection of a new channel in said television receiver for resetting said further means to an initial condition of operation. 5. The combination accordin
Description:
BACKGROUND OF THE INVENTION
Both of the above mentioned patents are directed to frequency synthesizer tuning systems for use with television receivers to enable operation of the receivers with minimal viewer fine tuning adjustments. By the utilization of the frequency synthesizer tuning systems of these patents, the fine tuning adjustment which is necessary with conventional types of television receiver tuning systems has been substantially eliminated. The system employed in the '953 patent permits utilization of a frequency synthesizer tuning system which correctly tunes to a desired television station or channel even if the transmitted signals from that station are not precisely maintained at the proper frequencies. The '535 patent is directed to a signal seek tuning system adaptation of the frequency synthesizer tuning system of the '953 patent which still permits implementation of all of the desired wide-band pull in range of the frequency synthesizer system of the '953 patent.
The systems of the foregoing patents operate effectively to correct automatically for frequency offsets in a frequency synthesizer tuning system without affecting the operation of the conventional frequency synthesizer used in the system. The systems of these patents are in widespread use commercially and permit direct selection, with automatic fine tuning adjustment, of any desired VHF channel which the viewer wishes to observe. In addition, the signal seek adaptation disclosed in the '535 patent couples all of the advantages of the frequency synthesizer tuning system of the '953 patent with the desirability of providing bidirectional signal seek operation.
While the systems disclosed in the foregoing patents operate in a highly satisfactory manner to accomplish the desired results of accurate tuning without the necessity of fine tuning adjustments, the circuitry for accomplishing the desired results is somewhat complex. It is desirable to reduce the circuit complexity and the number of signal detectors for accomplishing these results without compromising the accuracy of operation of the system.
SUMMARY OF THE INVENTION
Accordingly, it is an object of this invention to provide an improved tuning system for a television receiver.
It is an additional object of this invention to provide an improved frequency synthesizer tuning system for a television receiver.
It is another object of this invention to provide an improved frequency synthesizer tuning system for a television receiver which includes a provision for adjusting the synthesizer loop for frequency offsets in the received signal with a minimum number of signal detectors.
It is a further object of this invention to tune the local RF oscillator of a television receiver to the correct frequency for a selected channel with a frequency synthesizer tuning system, and automatically to change the reference frequency of the synthesizer system, or adjust the count of a programmable divider that produces a signal that divides the frequency of the local oscillator of the tuner, if the AFT signal produced by the AFT frequency discriminator of the receiver is outside a predetermined range corresponding to correct tuning.
It is still another object of this invention to provide an improved frequency synthesizer tuning system for a television receiver which operates to adjust the synthesizer loop for frequency offsets in the received signal over a relatively wide pull in range in response to the output of the receiver frequency discriminator by changing the division ratio of a programmable frequency divider in the reference oscillator leg or local oscillator leg of the synthesizer loop at a first relatively high rate from an initial nominal value to a pre-established maximum in one direction, and then resetting the division ratio to a second nominal value once the maximum is reached and continuing to incrementally change the division ratio in the same direction from the second nominal value until a properly tuned condition is indicated by the output of the receiver AFT frequency discriminator, followed by control at a lower rate of operation to maintain tuning during transmitting station drifts.
In accordance with a preferred embodiment of this invention, the frequency synthesizer tuning system for a television receiver includes a stable reference oscillator and a voltage controlled local oscillator in the tuner. A programmable frequency divider is connected between the output of the reference oscillator and one input to a phase comparator, the other input of which is supplied by the output of the local oscillator. The output of the phase comparator then comprises a control signal which is supplied to the local oscillator to control the frequency of its operation.
A counter circuit is connected to the programmable frequency divider for initially setting the divider to a predetermined division ratio upon selection of a desire
 d channel by the viewer. The counter then operates to change the programmable fraction of the division ratio at a first relatively high rate in a direction controlled by the output from the receiver picture carrier discriminator in the absence of a predetermined signal output derived from the discriminator. A control means causes the counter circuit to count in this direction until it is determined that a station is tuned or a predetermined maximum count is attained if no station is correctly tuned, thereupon resetting the counter circuit to a count which is a predetermined amount less than the maximum predetermined count. Counting is continued in the same predetermined direction from the new lesser count to continuously change the programmable fraction of the frequency divider in accordance with the state of operation of the counter. The high rate operation of the counter is terminated by the control means in response to a predetermined signal from the output of the discriminator, indicating that a station is correctly tuned, or after a fixed time-out interval; so that the system automatically adjusts for frequency offsets of the received signal which otherwise would cause the station to be mistuned if a conventional frequency synthesizer tuning system were used. After termination of the high rate operation of the counter, it is switched to a lower rate operation for maintaining tuning during transmitting station drifts.
d channel by the viewer. The counter then operates to change the programmable fraction of the division ratio at a first relatively high rate in a direction controlled by the output from the receiver picture carrier discriminator in the absence of a predetermined signal output derived from the discriminator. A control means causes the counter circuit to count in this direction until it is determined that a station is tuned or a predetermined maximum count is attained if no station is correctly tuned, thereupon resetting the counter circuit to a count which is a predetermined amount less than the maximum predetermined count. Counting is continued in the same predetermined direction from the new lesser count to continuously change the programmable fraction of the frequency divider in accordance with the state of operation of the counter. The high rate operation of the counter is terminated by the control means in response to a predetermined signal from the output of the discriminator, indicating that a station is correctly tuned, or after a fixed time-out interval; so that the system automatically adjusts for frequency offsets of the received signal which otherwise would cause the station to be mistuned if a conventional frequency synthesizer tuning system were used. After termination of the high rate operation of the counter, it is switched to a lower rate operation for maintaining tuning during transmitting station drifts.
BRIEF DESCRIPTION OF THE DRAWINGS
FIG. 1 is a block diagram of a television receiver employing a preferred embodiment of the invention;
FIG. 2 is a detailed block diagram of a portion of the circuit of the preferred embodiment shown in FIG. 1;
FIG. 3 is a detailed circuit diagram of a portion of a circuit shown in FIG. 1;
FIG. 4 is a flow chart of the control sequence of operation of the circuit shown in FIG. 1 and 2; and
FIG. 5 shows a waveform and time/frequency chart, respectively, useful in explaining the operation of the circuit shown in FIGS. 1, 2 and 3.
DETAILED DESCRIPTION
Referring now to the drawings, the same reference numbers are used throughout the several figures to designate the same or similar components.
FIG. 1 is a block diagram of a television receiver, which may be a black and white or color television receiver. Mo st of the circuitry of this receiver is conventional, and for that reason it has not been shown in FIG. 1. Added to the conventional television receiver circuitry of FIG. 1, however, is a frequency synthesizer tuning system, in accordance with a preferred embodiment of the invention, which is capable of automatically changing the reference frequency when a frequency offset exists in the received signal for a particular channel.
st of the circuitry of this receiver is conventional, and for that reason it has not been shown in FIG. 1. Added to the conventional television receiver circuitry of FIG. 1, however, is a frequency synthesizer tuning system, in accordance with a preferred embodiment of the invention, which is capable of automatically changing the reference frequency when a frequency offset exists in the received signal for a particular channel.
Transmitted composite television signals, either received over the air or distributed by means of a master antenna TV distribution system, are received by an antenna 10 or on antenna input terminals to the receiver. As is well known, these composite signals include picture and sound carrier components and synchronizing signal components, with the composite signal applied to an RF and tuner stage 11 of the receiver. The stage 11 includes the conventional RF amplifiers and tuner sections of the receiver, including a VHF oscillator section and a UHF oscillator section. Preferably, the UHF and VHF oscillators are voltage controlled oscillators, the freuency of operation of which are varied in response to a tuning voltage applied to them to effect the desired tuning of the receiver.
The output of the RF and tuner stages 11 is applied to the remainder of the television receiver 14, which includes the IF amplifier stages for supplying conventional picture (video) and sound IF signals to the video and sound processing stages of the receiver 14. The circuitry of the receiver 14 may be of any conventional type used to separate, amplify and otherwise process the signals for application to a cathode ray tube 16 and to a loudspeaker 17 which reproduce the picture and sound components, respectively, of the received signal.
The receiver 14 also includes a conventional AFT or automatic fine tuning discriminator circuit and additionally may include a synch separator circuit for producing an output in response to the presence of vertical synchronizatin pulses, a picture carrier detection circuit, and an automatic gain control (AGC) amplifier. Outputs representative of these sensor components are shown as being coupled over a group of lead 20 to sensory circuitry 22, which in turn couples outputs representative of the operation of these various sensor circuits to a microprocessor unit 23 for controlling the operation of the microprocessor unit.
The microprocessor unit 23 is utilized in the system of FIG. 1 for controlling the operation of a frequency synthesizer tuning system capable of automatic offset correction. When the viewer desires to select a new channel, he enters the desired channel number into a channel selection keyboard 25. There are a number of different keyboards which may be employed to accomplish this function, and the particular design is not important to this invention. The channel selector keyboard 25 also may include switches or keys for initiating a signal seek function in either the "up" or "down" direction.
Information represented by the selection of channel numbers on the keyboard 25 is supplied to the microprocessor unit 23 which provides output signals over a corresponding set of leads 27 to the tuners (local oscillators) 11 to effect the appropriate band switching control for the tuners 11 in accordance with the particular channel which has been selected. In addition, the keyboard 25, operating through the microprocessor unit 23, provides output signals which operate a channel number display 29 to provide an appropriate display of the selected channel number to the viewer.
 The microprocessor unit 23 also processes the signals which are used to operate the channel number display 29 through a multiplexing circuit operation to decode the selected channel number into a parallel encoded signal. This signal is applied to corresponding inputs of the count-down counter or programmable frequency divider 31 to cause the division number of the divider 31 to relate to the divided down frequency of the tuner local oscillators connected to the input of the divider 31 through a prescaler divider circuit 32 to the frequency of the reference oscillator 34. Thus, the division number or division ratio of the local oscillator frequency obtained from the output of the programmable divider 31 is appropriately related to the frequency of the reference crystal oscillator 34.
The microprocessor unit 23 also processes the signals which are used to operate the channel number display 29 through a multiplexing circuit operation to decode the selected channel number into a parallel encoded signal. This signal is applied to corresponding inputs of the count-down counter or programmable frequency divider 31 to cause the division number of the divider 31 to relate to the divided down frequency of the tuner local oscillators connected to the input of the divider 31 through a prescaler divider circuit 32 to the frequency of the reference oscillator 34. Thus, the division number or division ratio of the local oscillator frequency obtained from the output of the programmable divider 31 is appropriately related to the frequency of the reference crystal oscillator 34.
The output of the oscillator 34 also is applied through a countdown circuit or programmable frequency divider 35. Conventional frequency synthesizer techniques are employed; and the microprocessor unit 23 automatically compensates, through appropriate code converter circuitry, for the non-uniform channel spacing of the television signals. It has been found most convenient to cause the programmable frequency divider 31 to divide by numbers corresponding directly to the oscillator frequency of the selected channel, for example, 101, 107, 113 . . . up to 931.
In accordance with the time division multiplex operation of the microprocessor 23, the count of the programmable frequency divider 35 initially is adjusted to a fixed count by the application of appropriate output signals from the microprocessor unit 23 to a point selected to be at or near the mid-point of the operating range of the programmable frequency divider 35. Thus, the output of the divider 35 is a stable reference frequency (because the input is from the reference crystal oscillator 34) which is used to establish initially and to maintain tuning of the receiver to the selected channel.
The output of the programmable divider 35 is applied to one of two inputs of a phase comparator circuit 37. The other input to the phase comparator circuit 37 is supplied from the selected one of the VHF or UHF oscillators in the tuner stages 11 through the programmable frequency divider 31. The phase comparator circuit 37 operates in a conventional manner to supply a DC tuning control signal through a phase locked loop filter circuit 39 and over a lead 40 to the oscillators in the tuner system 11 to change and maintain their operating frequency.
With the exception of the use of the microprocessor unit 23, the operation of the system which has been described thus far is that of a relatively conventional frequency synthesizer system incorporated into a television receiver. This system is similar to the system of the '953 patent. As in the system of that patent, the system shown in FIG. 1, when the transmitted station or station received on a master antenna distribution system provides the station or channel signals at the proper frequency, operates as a relatively conventional frequency synthesizer system. If, however, there is a frequency offset in the received signal to cause the carrier of the received signal to be displaced from the frequency which it should have to some other frequency, it is possible that the system would give the appearance of mistuning to the received station. The microprocessor 23, operating in conjunction with the sensory circuitry 22, is employed in conjunction with the countdown or programmable frequency divider circuit 35 to eliminate this disadvantage and still retain the advantages of frequency synthesizer tuning.
Reference now should be made to FIG. 2 which shows details of t he interface between the keyboard 25, the microprocessor unit 23, and the circuitry used in the frequency synthesizer portions of the system. A commercially available microprocessor which has been used for the microprocessor 23, and which forms the basis for the diagramatic representation of the microprocessor in FIG. 2, is the Matsushita Electronics Corporation MN1402 four-bit single-chip microcomputer. This microcomputer has two, four-bit parallel input ports labeled "A" and "B". In addition, three output ports, a five-bit output port "C" and two four-bit output ports "D" and "E" are provided. The internal configuration of the microcomputer 23 includes an arithmetic logic unit (ALU), a read only memory (ROM) for storing instructions and constants, and a random access memory (RAM) used for data memory, arranged into four files, each file containing 16 four-bit words. These words are selected by X and Y registers and this memory is used, for example, for timers, counters, etc., and also is used to hold intermediate results. To facilitate an understanding of the operation of the system, a portion of this memory is shown in FIG. 2 as a clock 81 and a reversible counter 82 connected between the "B" input port and the "D" output port. The microcomputer 23 is programmed to permit it to operate in conjunction with the remainder of the circuits shown in FIG. 2. The programming techniques are standard, and the microcomputer 23 itself is a standard commercially available circuit component.
he interface between the keyboard 25, the microprocessor unit 23, and the circuitry used in the frequency synthesizer portions of the system. A commercially available microprocessor which has been used for the microprocessor 23, and which forms the basis for the diagramatic representation of the microprocessor in FIG. 2, is the Matsushita Electronics Corporation MN1402 four-bit single-chip microcomputer. This microcomputer has two, four-bit parallel input ports labeled "A" and "B". In addition, three output ports, a five-bit output port "C" and two four-bit output ports "D" and "E" are provided. The internal configuration of the microcomputer 23 includes an arithmetic logic unit (ALU), a read only memory (ROM) for storing instructions and constants, and a random access memory (RAM) used for data memory, arranged into four files, each file containing 16 four-bit words. These words are selected by X and Y registers and this memory is used, for example, for timers, counters, etc., and also is used to hold intermediate results. To facilitate an understanding of the operation of the system, a portion of this memory is shown in FIG. 2 as a clock 81 and a reversible counter 82 connected between the "B" input port and the "D" output port. The microcomputer 23 is programmed to permit it to operate in conjunction with the remainder of the circuits shown in FIG. 2. The programming techniques are standard, and the microcomputer 23 itself is a standard commercially available circuit component.
There are several system parameters that must be selected in the operation of the system shown in FIG. 2. The selection of the nominal frequency of the two signals that feed the phase comparator circuit 37 is an example. Channel selection is provided by changing the frequency division ratio of the selector counter 31 which divides the local oscillator signal after this signal is passed through a prescaler circuit 32 and a divide-by-two divider circuit 41. The nominal frequency from the programmable frequency divider 31 (selector counter) is selected so that the local oscillator (tuner) 11 can be set exactly on frequency for all channels.
Since the frequency divider 31 is able to divide only by integer numbers, one distinct frequency possibility in the range of one KHz is obtained, another in the range of two KHz, etc. A choice must be made as to which of these values is optimum. Each value yields the nominal frequency of all of the 82 channels by simply multiplying by an appropriate integer for each channel. To simplify the phase locked loop filtering problem by the filter 39, it is desirable that the frequencies of the signals supplied to the phase comparator 37 are as high as possible. This permits rapid acquisition of a new channel along with a very clean DC control signal to adjust the local oscillator. A trade-off for this, however, must be made to permit fine tunning adjustment of the local oscillator automatically to correctly tune in stations which are off their assigned frequency, or to manually provide this feature, if desired. The two-speed operation of the system in accordance with the present invention allows a better trade-off to be made by allowing rapid acquisition and then a slower speed for precise tuning.
A compromise solution which is utilized in the circuit of FIG. 2 is to cause the frequency division chain from the local oscillator 11 in the tuner to the phase comparator 37 to be composed of the fixed divide-by-256 prescaler 32, and a fixed divide-by-4 division, which is accomplished by the divider 41 at the input of the counter 31 and a second divider 42 at the output of the counter 31. The variable frequency divider counter 31 then is loaded by means of three latch circuits 44, 45 and 46 at an appropriate time by the time division multiplex operation of the microcomputer 23 and a number that programs the programmable frequency divider counter 31 to divide by the numerical value of the frequency of the local oscillator in MHz for the channel selected. For example, if the receiver is to be tuned to channel 2, which has a nominal local oscillator frequency of 101 MHz, the programmable frequency divider 31 is set to divide by 101. If the receiver is to be tuned to channel 83, which has a nominal local oscillator frequency of 931 MHz, the programmable frequency divider 31 is set to divide by 931. In both cases, the variable divider 31 produces a 1 MHz signal. However, because of the fixed divide-by-256 and the two fixed divide-by-two dividers in series with the programmable divider 31, an output frequency of 976.5625 Hz is supplied from the output of the divider 42 to the upper input of the phase comparator 37.
The division ratio of the selector counter 31 is established by appropriate output signals from the latch circuits 44, 45 and 46, as mentioned above. The initial operation for changing, or maintaining, the division ratio of the divider 31 is established by an entry of the two digits of the selected channel number in the keyboard 25. The microcomputer 23 operates as a time division multiplex system for continuously monitoring the input ports and the output ports to control the operation of the remainder of the system. The selection of the two digits of the desired channel number is affected by a time division multiplex iscanning of the outputs of the D output port of microcomputer 23 and providing that information at the A input port. From here the information is translated again to the D output ports to the appropriate drivers of the channel number display circuit 29 and to the latches 44, 45 and 46, and to a pair of similar four bit latches 49 and 50 which control the divider ratio of the counter 35.
Although the D output ports of the microcomputer 23 are connected in common to all of these various portions of the circuit, the selection of which of the latches are enabled to respond to the particular output signals appearing on the D output ports at any given time is effected through the C and E output ports of the microcomputer 23 in a time division multiplex fashion. A decoder circuit 52, connected to the lowermost three outputs of the E output port of the microcomputer 23, is used to apply unique decoding signals at different times in the time division multiplex sequence of operation of the microcomputer 23 to the five latch circuits 44, 45, 46, 49 and 50, respectively. At any given time in the sequence, only one of these latch circuits is enabled for operation. A latch load signal is applied from the upper output (EO3) at each cycle of operation of the signals appearing on the E output port to set the latch circuit which is enabled by the output of the decoding circuit 52 with the data appearing on the other inputs to the latch circuit. This data simultaneously appears on the four outputs of the D output port of the microcomputer 23.
Thus, in rapid sequence, the latch circuits 44, 45 and 46 are set to store the division number corresponding to the selected channel entered onto the keyboard 25, and the latch circuits 49 and 50 are each operated to set the programmable divider reference counter 35 to a center or nominal count, which is always the same upon the selection of a new channel on the keyboard 25. Similarly, the two right-hand outputs of the C output port (CO6 and CO5) enter the two digits of the selected channel number in the drivers of the display circuit 29 at the proper time in the binary encoded sequence when these digits appear on the four-bit binary encoded representation of the D output port. This results in a visual display of the channel number selected.
In addition to the selection of a channel number directly by the keyboard 25, the keyboard also may include an additional switch 56, which is scanned in the time division multiplex sequence to determine if the receiver is placed in a "seek" mode of operation (when the signal seek capability is incorporated into such a receiver). Operating in conjunction with the signal seek switch 56 are a pair of "up" and "down" seek direction input switches shown with a graphic representation of the seek directions on the keyboard 25. A further provision is provided by two keys labeled "U" and "D", which are used for "manual" fine tuning of the receiver in the "up" or "down" directions depending upon which of the two keys U or D has been operated. The keyboard 25 includes one additional switch 58 which may be used to disable the automatic fine tuning (AFT) portion of the circuit by rendering the microcomputer insensitive to the signal output from the AFT circuit, in a manner described more fully subsequently.
As is ap
parent from the foregoing, the microcomputer 23 provides the intelligence, decision making, and control for the system operation. It is a complete self contained computer. The decisions or signal inputs upon which the microcomputer 23 bases its operation include, in addition to the inputs from the keyboard 25, inputs on sensory inputs into the B input port and into the SNS1 and SNS0 inputs as shown in FIG. 2. These input signals are used to provide an indication to the microcomputer 23 of the presence or absence of a received signal; and if the presence of such a signal is indicated, the inputs provide a further indication of the accuracy of the tuning of the receiver to that signal. If the system is being operated solely in a manual mode of operation (AFT switch 58 open), the microcomputer 23 disregards all of this sensory information and tunes to the frequency allocation of the channel selected in the manner described above. The system will stay tuned to this condition, operating as a conventional frequency synthesizer, whether or not a station is present in the received signal.
When the system is placed in its automatic mode of operation (similar to the mode of operation of the above mentioned '953 patent), the counter 82, integrally formed as part of the microcomputer 23, continuously adds or subtracts one number at a time from the nominal value or programmable division fraction entered into the programmable frequency divider 35 at the outset of each new channel number selection when frequency offset (mistuning) is present. The counter 82 is driven at a relatively high counting rate by clock pulses from the clock 81 during this initial or forced search mode of operation. Thus, automatic offset correction is provided for any channel which is off its assigned frequency. The offset correction automatically adjusts the frequency of the local oscillator by changing the division ratio of the signal from the reference oscillator 35 applied to the lower input of the phase comparator 37. By doing this, the output of the phase comparator 37 applied to the local oscillator 11 varies to cause the oscillator to be tuned in the proper direction to compensate for the transmitting station mistuning.
When the system is operating in its automatic mode of operation, the microcomputer 23 responds to the sensor information applied to it on its B input ports and on the S1 input port shown in FIG. 2. These inputs are obtained from the various outputs of the operational amplifiers shown connected to the corresponding input ports in the detailed circuit of FIG. 3. Depending upon whether the receiver is provided with a signal seek feature or not, one or more of the sensory inputs of the circuit of FIG. 3 are used. The s ystem shown in the drawings has a capability of correcting for frequency offsets larger than 1.5 MHz on channels 2 and 7 and approximately 2 MHz on channels 6 and 13. The remainder of the channels have a range between these two values.
ystem shown in the drawings has a capability of correcting for frequency offsets larger than 1.5 MHz on channels 2 and 7 and approximately 2 MHz on channels 6 and 13. The remainder of the channels have a range between these two values.
If the receiver is not tuned properly, the micromputer 23 executes the localized search of the tuning range mentioned above. Since there is a necessary settling down time for the tuning of a television receiver immediately following selection of a new channel, a time interval of 250 milliseconds has been selected to prevent any localized search or offset frequency correction until the expiration of this "settling down" time period. If, at the end of this 250 millisecond time interval, a properly tuned station is present, this is indicated by the sensory outputs from the television receiver and no localized search is effected to change the division ratio or programmable divider count in the reference counter 35 for a system that also has signal seek.
A system with no signal seek capability is described later that requires less sensory input but which uses a time period where a forced search is required directly after the settling time interval.
Upon termination of the 250 millisecond settling down period, the microcomputer 23 is rendered responsive to the sensory input signals on its sensory input signal ports. In the simplest form, only the output of the frequency discriminator 60 (FIG. 3) applied to three comparators 61, 62 and 63 is used to provide the necessary tuning information to the microcomputer 23. The outputs of these comparators are applied to the B12 and B11 inputs of the microcomputer. The comparator 61 simply is a conventional comparator for determining whether or not the output of the frequency discriminator is positive or negative, as indicated in the upper waveform of FIG. 5. The comparators 62 and 63 are each adjusted with appropriate reference input levels to provide a narrow window centered about the center tuning frequency (fc) of the receiver. If the tuning of the receiver, as indicated by the output of the frequency discriminator 60, is outside this window on either side of the central axis shown in FIG. 5, one output condition is indicated on the input terminal B11 of the microcomputer. Only when the tuning frequency is within the tuning window, indicative of a properly tuned receiver, is the appropriate input applied to the microcomputer input terminal B11. This input overrides any other input that may be present on the input terminal B12 and is indicative of a properly tuned receiver. The input from the frequency discriminator 60, as applied to the microcomputer on its input port B12, is used to determine the direction of operation of the counter 82 of the microcomputer for the localized search count signals applied to the latch circuits 49 and 50 to change the count of the reference programmable divider counter 35 on a step-by-step basis.
The lower graph of FIG. 5 plots the relative frequency of the local oscillator 11 to the received signal frequency with respect to time. The various arrows are used to indicate the manner of operation of the counter 82 in the microcomputer 23 in conjunction with the reference counter 35 for adjusting for any mistuning conditions which may exist after the initial station selection has been effected in the manner described above.
If the receiver is properly tuned, the outputs from the comparators 62 and 63 of FIG. 3 which are combined together and applied to the input port B11 of the microcomputer 23, provide an indication that the tuning is within the properly tuned center frequency window. As a consequence, no further operation of the microcomputer to change any of the outputs applied to the latch circuits 49 and 50 for the duration of this condition is effected. On the other hand, if the receiver is mistuned on either side of the proper tuning frequency, the various operating characteristics shown in FIG. 5 are effected.
Assume initially that the receiver is capable of making tuning adjustments over a range of fc plus Δf to fc minus Δf, as indicated in the top waveform of FIG. 5. Three specific examples of mistuning will then be considered. Initially, assume that the local oscillator is mistuned relative to the received signal to a frequency f1 as shown in the lower graph of FIG. 5. In this condition, the outout of the frequency discriminator 60 is positive since this signal frequency lies to the lefthand side of the center or properly tuned region of operation of the discriminator. Under this condition of the operation, the input signal applied to the sensor port B12 of the microcomputer 23 is such that the microcomputer counter 82 is caused to advance in a positive direction to change the programmable division ratio or count of the reference counter 35 in a manner to force the output of the phase comparator 37 to adjust the frequency of the local oscillator until the proper tuning indicated at point B in the lower graph of FIG. 5 is reached. The time interval for accomplishing this result is measured from the upper end of the arrow representative of the frequency f1 to the point B.
Now assume that the receiver mistuning is to a frequency f2 which as shown in FIG. 5 as located on the righthand-side of the center axis fc. In this condition, the discriminator output is negative. This is reflected in the output of the comparator 61 applied to the input port B12 of the microcomputer 23. The polarity of this signal is identified by the microcomputer 23 to cause the counter 82 in it to operate in the reverse direction. As this count is applied on a step-by-step basis through the latch circuits 49 and 50 to the reference counter 35, the division ratio or count of the reference counter (divider) 35 is changed. As a result, the reference oscillator signal applied to the phase comparator 37 causes the phase comparator 37 output to drive the local oscillator frequency in a direction opposite to that considered in the first example. This is shown by the vector interconnecting the top of the arrow representative of f2 to point A on the time/frequency graph of FIG. 5.
As discussed in the general discussion above, whenever the tuning frequency reaches the narrow window on either side of fc, the outputs of the comparators 62 and 63 provide the necessary indication on the sensory input port terminal B11 to cause termination of the operation of the counter 82 in the microcomputer 23. Then the reference counter 35 remains set to the count attained just prior to the appearance of this input signal on the input port B11 of the microcomputer 23.
A third mistuning condition can exist, and ordinarily this condition results in an ambiguity which cannot be corrected simply by responding to the signal polarity at the output of the frequency discriminator. This is indicated by the mistuned condition where the difference between the local oscillator frequency f3 and the transmitter frequency is such that the signal f3 lies in the range to the right of the negative portion of the discriminator output shown in the upper waveform of FIG. 5. In this condition, the associated sound causes the discriminator output to be positive; so that the television receiver normally would attempt to tune toward the next adjacent channel and away from the properly tuned center frequency of the channel which is desired. The output of the discriminator 60 in this situation is the same as it was in th e first example considered for frequency f1; so that the counter 82 of the microprocessor 23 operates to change the count in the reference counter 35 in a manner to cause the local oscillator frequency to go higher toward a frequency f3 +Δf, as shown in FIG. 5.
e first example considered for frequency f1; so that the counter 82 of the microprocessor 23 operates to change the count in the reference counter 35 in a manner to cause the local oscillator frequency to go higher toward a frequency f3 +Δf, as shown in FIG. 5.
A predetermined number of counts of the counter 82 in the microcomputer 23 are necessary for the microcomputer to count through the frequency range Δf, and this range is selected to be within the pull in or operating range of the system. Once this count has been attained, the microcomputer counter 82 immediately is reset back to a count which corresponds to a frequency 2 Δf lower than the frequency attained by the maximum count. This is indicated in FIG. 5 by the frequency f3-Δf. Because the microcomputer counter 82 is limited to counting a number of counts equal to Δf, this new frequency now is on the lefthand side of the center line fc, shown in both waveforms of FIG. 5. This places the local oscillator frequency at a point such that the frequency discriminator output is the positive output shown on the lefthand-side of the upper waveform of FIG. 5. Counting continues in the same direction as previously. This time, however, it is in a proper direction to bring about correct tuning; and when the center frequency is reached, the output of the comparators 62 and 63 cause the microcomputer 23 to stop its count. The proper tuning point attained is indicated at point C on the graph of the lower part of FIG. 5.
Because the counter 82 of the microcomputer is limited to a maximum count equivalent to Δf above its initial count and thereupon is reset to a new count equivalent to 2 Δf lower than the maximum count, it is not necessary to utilize any other sensory inputs in order to properly tune the receiver over a wide pull in range (as much as plus or minus 2 MHz). Only the output of the conventional frequency discriminator 60 is used to provide the necessary sensory inputs.
The counter 82 of the microcomputer 23 is operated by the clock 81 during the foregoing sequence of operation, immediately following the selection of a new channel by the operation of the keyboard 25, at a fast or high speed operation. Typically, the counter steps are 10 milliseconds per step; so that there are no initial visual effects which can be noticed by an observer of the television screen of the receiver being tuned. The maximum forced search period is approximately 900 milliseconds in duration. At the end of this time interval, a timer in the microcomputer 23 causes a signal to be applied through the outputs of the E output port to the decoder circuit 52 indicative of the completion of this time interval. The decoder 52 then applies a pulse on an output lead connected to the B13 input of the B input port of the microcomputer 23. This pulse is sensed by the microcomputer 23 and is applied to the clock 81 to change the clock rate to a much slower rate, approximately one-third (1/3) or one-fourth (1/4) the rate used previously during the forced search mode of operation. This then permits the system to accomodate station drifts which normally occur at a very slow rate during the transmission and reception of a television signal. As a consequence, it is possible to use more filtering in the filter 39 on the tuning line (FIG. 1) and employ a smaller frequency window for the channel verification sensed by the circuitry shown in FIG. 3. The result is a more precise tuning from the receiver than is otherwise possible if only a high speed operation of the clock 81 is utilized.
When the channel once again is changed by operation of the keys in the keyboard 25 or operation of the channel selection circuitry from a remote control unit, this new channel input is sensed by the microcomputer 23 from the signals applied to the A input port and the clock 81 is reset to its fast time or the forced search mode of operation; and the process resumes.
Instead of employing an additional decoding function in the decoder 52, a separate decoder also could be connected to the outputs of the D output ports to feed back the signal to the B13 input terminal of the B input port of the microcomputer 23. The operation of the system to change the rate or frequency of the pulses applied by the clock 81 to the counter 82 otherwise is the same as described above.
Although applicant has found that it is preferable to correct for mistuning or frequency offsets by adjusting the count or division ratio of the counter 35, such offset adjustments also could be effected by adjusting the count in the counter 31 in the local oscillator signal line. The operation in such a case is the same as described above for adjusting the count in the counter 35.
If the receiver is to be used with an automatic signal seek mode of operation, however, additional sensory inputs are necessary. These inputs operate in conjunction with the output of the frequency discriminator 60. The operation of the microcomputer 23 in controlling the count of the reference programmable frequency counter divider 35 is the same as described above. The additional sensory inputs simply are used in conjunction with the outputs of the comparators 62 and 63 to signal the microcomputer 23 to assure that tuning is to a picture channel rather than an adjacent sound channel. This is accomplished by utilizing the output of the synchronizing signal separator 65 which is applied to a comparator 67 to produce an output signal to the SNS1 sensory input of the microcomputer 23 only when vertical synchronizing signal components are present.
In addition, the output of a picture carrier detector 69 is applied to the input of a comparator 70 to produce an output to the B10 sensory input of the microcomputer 23. If the picture carrier detector 69 is producing an output indicative of the presence of a carrier, but no output is being obtained from the vertical synch separator 65 at the same time, the system is mistuned to a sound carrier and the microcomputer 23 is permitted to continue its localized search until a properly tuned station is found. Only when there is coincidence of signals from the picture carrier detector 69, the synch signal separator 65, and the automatic frequency discriminator window as determined by the comparators 62 and 63, is the microcomputer operation terminated to indicate that a properly tuned channel is present.
Further insurance of tuning the receiver only to a strong signal also can be provided by the addition of an AGC amplifier 72. This is connected to a comparator 74 coupled to the B10 input port along with the output of the picture carrier detector comparator 70. When the AGC amplifier 72 is used as a sensory input, the microcomputer operation, when the system is used in a signal seek mode, is only terminated to indicate reception of a valid signal when that signal is strong enough to produce the desired output from the comparator 74. The signal level which is acceptable is set by a potentiometer 75.
It should be noted that when the system is operated in a signal seek mode, the sensory inputs must indicate the reception of a properly tuned signal within a pre-established time period. If no signal is sensed by the various sensory input circuits operating in conjunction with one another as described above, the microcomputer 23 automatically steps to the next channel number and repeats the sequence of operation described above. This is when it is placed in its signal seek mode of operation. If signal seek is not employed, the additional sensory circuits 65, 69 and 72 are not necessary, and the inputs to the microcomputer which are provided from these sensory circuits are not utilized. The sensory signal input which is used both for a receiver without a signal seek capability of operation and for a receiver which has a signal seek mode of operation in it, is the output of the frequency discriminator 60 operating in conjunction with the comparators 61, 62 and 63 as described above.
As indicated above, the wideband method of tuning precisely to an incoming signal that is at the wrong frequency described here only needs the frequency discriminator sensory information. The method that uses the additional sensors described above is needed to make this system operate compatibly with signal seek but it is not restricted to seek operation.
For a system that does not use signal seek operation, only the frequency discriminator sensory input is required for proper operation. The discriminator 60 is used for both fine tuning direction information and to produce a frequency window to indicate the presence of a correctly tuned station (channel verification). Initially, after a channel change, there is a 250 millisecond settling time, the same as the operation described above with compatible seek. After that, however, comes a period of time where a forced localized search is produced by the microcomputer 23. The forced search is needed to insure that the system will correctly tune to stations that initially may be tuned to the undesired zero voltage crossover in the right half of the upper curve of FIG. 5. Such signals may be within the frequency window of the discriminator 60; and if a search is not forced, this system will not correctly tune. The compatible seek system described previously correctly tunes the local oscillator without a forced search, because the picture carrier detector and vertical detector do not give an output for this situation and the system automatically goes into its search mode of operation. However, the non-seek system does not have a picture carrier sensor input and must be forced to search for an initial period of time sufficient to allow the system to tune up to its maximum frequency and then reset (loop) back to a frequency of 2 Δf lower. Then it is tuned to the positive left half portion of the discriminator curve (FIG. 5) and the frequency window created by the discriminator 60 is sufficient to insure proper tuning. If the discriminator output produced by the desired incoming signal created an initial situation that produces the correct tuning direction information, i.e., in the left half of the curve of FIG. 5, or in the right half portion that gives the correct direction and frequency window information, the forced search would not be needed. However, the forced search will produce a correct tuning situation anyway. In these cases, the tuning either is correct to begin with or correct tuning is reached quickly. Then, even though the forced search is active, it simply alternates up and down through the correct tuning point because each time the receiver is tuned a little high in frequency, it produces a negative output from the discriminator 60; and the tuning direction signal causes the system to tune down in frequency. Then, a positive discriminator output is produced, and the system tunes up in frequency. This continues until the forced search is removed by time-out of the microcomputer 23 (a fraction of a second). At such time, the receiver is correctly tuned by the frequency window of the discriminator to be very near fc. The system cannot tune to the undesired discriminator crossover shown in the right half portion of FIG. 5 because the polarity of the tuning direction signal always causes it to tune away from that point.
The fast time or forced search operation of the system can be terminated in a different way other than the preestablished time-out period described above in conjunction with the operation of the circuit shown in FIG. 2. Generally, it is desirable to build into the system (or program into the system by means of software) such a maximum time-out period to effect the operation which has been described above to terminate the search and cause the clock 81 thereafter to operate in a low speed mode of operation. Termination also can be accomplished by sensing the number of changes in the direction sensor input applied to the B12 terminal of the B input port to cause the search to be terminated when this direction changes three times (or more). By doing this, any flicker that might be observed on the screen of the television receiver is minimized, since the forced search still takes place at the high rate of application of clock pulses from the clock 81 to the counter 82 in the same manner described above.
Termination of the search, however, also may be effected by means of a search terminate counter 78 (FIG. 3), which is advanced by pulses applied to it each time the output of the comparator 61 changes its sign (indicative of a change in direction for the counter 82) as applied to it through the B12 input port, as described earlier. After three of these changes, or some other number if desired, an output pulse is obtained from the search terminate counter 78 and is applied to the SNS0 input of the microcomputer 23. This causes the operation of the clock 81 to be switched to its low speed mode of operation to terminate the fast or "forced search" mode of operation. The next time a new channel number is entered on the keyboard 25, a reset pulse is applied to the search terminate counter 78 to reset it to its original or zero count, thereby readying it for anothe
r sequence of operation. It is apparent that the search terminate counter 78 may not always be operated to terminate the count, since the time-out interval which is sensed by the decode circuit 52 and applied to the B13 input port of the microcomputer 23 may occur before there are three changes of direction of the search. In any event, the next time a new channel number is entered into the keyboard 25, the search terminate counter 78 is reset; so that it is irrelevant whether this counter reaches a full count or not to effect the termination of the forced search operation of the system.
FIG. 4 shows the control sequence of the system which is stored in the ROM (Read Only Memory) of the microcomputer 23. The microcomputer 23 operates by always running through the flow sequence, via loops L1, L2 and L3. Loop L1 corresponds to a new channel selection by two digit number entry. Loop L2 corresponds to channel number increment or decrement by an up or down key operation, respectively, or by seek operation. Loop L3 corresponds to fine tuning, either manual or automatic. To obtain exact timing for system control, the microcomputer 23 receives a standard timing pulse from the output of the reference counter 35 divided in a divide-by-five counter 80 and applied to the A13 input port of the microcomputer 23. The control functions which are programmed into the microcomputer 23, as indicated in the flow chart of FIG. 4, are outlined in the following paragraphs.
Channel Number Correction: An invalid two digit channel number entry (0, 1, 84, 99) is corrected. When the operation of the receiver is in the signal seek mode, the next channel up from 83 is channel 2, and the next lower channel from channel 2 is 83.
PLL Control I: For a given channel number, a corresponding binary code for the PLL selector counter 31 is derived as described previously. For UHF channels, the local oscillator frequency separation between two adjacent channels is 6 MHz and the code for PLL is generated by the microcomputer 23 through means of a simple calculation. This code then is transferred from the microcomputer 23 to the latches 44, 45 and 46 as described previously.
PLL Control II: This routine of the microcomputer 23 is used to transfer the fine tuning data to the latches 49 and 50 which control the count of the reference counter 35 in the PLL circuit.
Channel Number Display: The channel number is transferred from the microcomputer 23 to the driver latches of the display driver circuit 29.
Key Input Detection: The keyboard is arranged as the matrix circuit shown in FIG. 2. ROM programming for scanning and acknowledging a keyboard entry only after successive indications provides protection against false entry due to contact bounce. The four data output lines of the D output port of the microcomputer 23 are used to transfer data to the phase lock loop section of the circuit and to the display circuit 29, as well as for scanning the keyboard matrix circuit.
Time Count: The microcomputer 23 receives a basic timing pulse of approximately 200 Hz from the output of the divider 80 and performs various controls for each timing pulse. By way of example, sensing for the vertical synch input (when the system is used with a signal seek capability) on the input port SNS1 takes place every 2.5 milliseconds. Automatic seek timing is selected to be 133 milliseconds for UHF channels. All of these timing pulses are derived from the basic synchronization timing pulse applied to the microcomputer on the A13 input port from the output of the divider 80. Various other timing values used in the microcomputer to properly time multiplex sequence the operation are derived from this basic timing pulse.
Sensor Input Detection: As described previously, the output of the comparators shown in FIG. 3 reflect the status of the tuning of the television receiver. If no signal seek mode of operation is used, only the frequency discriminator or AFT discriminator 60 is necessary. When a system is being used in a signal seek mode, a proper television signal receipt is indicated by the presence of a vertical synch signal at the output of the synch signal separator 65 and corresponding outputs are applied to the input leads B10 and B11 (high level input signals) indicative of tuning to the "correct tuned" frequency discriminator window and reception of a picture carrier. As stated previously, the signal present on the B12 input lead is used to determine the direction of tuning when the receiver is operated in its automatic mode.
Mode Detection: The status of the seek and automatic/manual (A/M) switches are detected. If the A/M switch (not shown) is in its automatic position, automatic seek and offset correction are active. If only the seek switch is on, only seek is performed. If the A/M switch is in manual, manual fine tuning (MFT) is active.
Automatic Mode: If the TV receiver is not properly tuned for VHF channels in automatic, the local oscillator frequency is shifted automatically toward proper tuning. The fine tuning data is generated in the microcomputer 23 and is transferred to the latches 49 and 50 for the reference counter 35 in the PLL circuit.
Manual Fine Tuning (MFT) Control: The local oscillator frequency is shifted by pushing the fine tuning up (U) or down (D) pushbutton or switch. This MFT control can be applied to VHF channels as well as to UHF channels.
Channel Up/Down: When a channel up (upward pointing arrow) or down (downward pointing arrow) key closure in the keyboard 25 is detected, or upon a direct access to an unused channel, this routine is activated and the system will advance to the next channel in the selected direction.
The foregoing embodiment of the invention which has been described above and which is illustrated in the drawings is to be considered illustrative of the invention, which is not limited to the specific embodiment selected for this purpose. For example, hard-wired logic could be used to achieve the various circuit operations which are accomplished by the microcomputer 23 in conjunction with the other portions of the system. The relative ease of programming and debugging the microcomputer 23, however, make it much simpler to implement the system operation with the microcomputer than with hard-wired logic. With respect to the sensor circuit inputs to the system, an added degree of operating assurance can be provided by the addition of a sound carrier sensor in addition to the picture carrier sensor shown in FIG. 3. If this feature is desired, the output of the comparator for the sound carrier is combined with the outputs of the comparators 70 and 74 at the input terminal B10 of the B input port of the microcomputer 23. Because of the manner of the circut operation which has been described previously, however, the addition of a sound carrier detector to the system is not considered necessary, even for a system operating in the signal seek mode of operation. This is in contrast to conventional television receivers having a signal seek operation, in which detection of the sound carrier generally is a necessity to insure that mistuning of the receiver to an adjacent sound carrier does not take place.
Both of the above mentioned patents are directed to frequency synthesizer tuning systems for use with television receivers to enable operation of the receivers with minimal viewer fine tuning adjustments. By the utilization of the frequency synthesizer tuning systems of these patents, the fine tuning adjustment which is necessary with conventional types of television receiver tuning systems has been substantially eliminated. The system employed in the '953 patent permits utilization of a frequency synthesizer tuning system which correctly tunes to a desired television station or channel even if the transmitted signals from that station are not precisely maintained at the proper frequencies. The '535 patent is directed to a signal seek tuning system adaptation of the frequency synthesizer tuning system of the '953 patent which still permits implementation of all of the desired wide-band pull in range of the frequency synthesizer system of the '953 patent.
The systems of the foregoing patents operate effectively to correct automatically for frequency offsets in a frequency synthesizer tuning system without affecting the operation of the conventional frequency synthesizer used in the system. The systems of these patents are in widespread use commercially and permit direct selection, with automatic fine tuning adjustment, of any desired VHF channel which the viewer wishes to observe. In addition, the signal seek adaptation disclosed in the '535 patent couples all of the advantages of the frequency synthesizer tuning system of the '953 patent with the desirability of providing bidirectional signal seek operation.
While the systems disclosed in the foregoing patents operate in a highly satisfactory manner to accomplish the desired results of accurate tuning without the necessity of fine tuning adjustments, the circuitry for accomplishing the desired results is somewhat complex. It is desirable to reduce the circuit complexity and the number of signal detectors for accomplishing these results without compromising the accuracy of operation of the system.
SUMMARY OF THE INVENTION
Accordingly, it is an object of this invention to provide an improved tuning system for a television receiver.
It is an additional object of this invention to provide an improved frequency synthesizer tuning system for a television receiver.
It is another object of this invention to provide an improved frequency synthesizer tuning system for a television receiver which includes a provision for adjusting the synthesizer loop for frequency offsets in the received signal with a minimum number of signal detectors.
It is a further object of this invention to tune the local RF oscillator of a television receiver to the correct frequency for a selected channel with a frequency synthesizer tuning system, and automatically to change the reference frequency of the synthesizer system, or adjust the count of a programmable divider that produces a signal that divides the frequency of the local oscillator of the tuner, if the AFT signal produced by the AFT frequency discriminator of the receiver is outside a predetermined range corresponding to correct tuning.
It is still another object of this invention to provide an improved frequency synthesizer tuning system for a television receiver which operates to adjust the synthesizer loop for frequency offsets in the received signal over a relatively wide pull in range in response to the output of the receiver frequency discriminator by changing the division ratio of a programmable frequency divider in the reference oscillator leg or local oscillator leg of the synthesizer loop at a first relatively high rate from an initial nominal value to a pre-established maximum in one direction, and then resetting the division ratio to a second nominal value once the maximum is reached and continuing to incrementally change the division ratio in the same direction from the second nominal value until a properly tuned condition is indicated by the output of the receiver AFT frequency discriminator, followed by control at a lower rate of operation to maintain tuning during transmitting station drifts.
In accordance with a preferred embodiment of this invention, the frequency synthesizer tuning system for a television receiver includes a stable reference oscillator and a voltage controlled local oscillator in the tuner. A programmable frequency divider is connected between the output of the reference oscillator and one input to a phase comparator, the other input of which is supplied by the output of the local oscillator. The output of the phase comparator then comprises a control signal which is supplied to the local oscillator to control the frequency of its operation.
A counter circuit is connected to the programmable frequency divider for initially setting the divider to a predetermined division ratio upon selection of a desire
BRIEF DESCRIPTION OF THE DRAWINGS
FIG. 1 is a block diagram of a television receiver employing a preferred embodiment of the invention;
FIG. 2 is a detailed block diagram of a portion of the circuit of the preferred embodiment shown in FIG. 1;
FIG. 3 is a detailed circuit diagram of a portion of a circuit shown in FIG. 1;
FIG. 4 is a flow chart of the control sequence of operation of the circuit shown in FIG. 1 and 2; and
FIG. 5 shows a waveform and time/frequency chart, respectively, useful in explaining the operation of the circuit shown in FIGS. 1, 2 and 3.
DETAILED DESCRIPTION
Referring now to the drawings, the same reference numbers are used throughout the several figures to designate the same or similar components.
FIG. 1 is a block diagram of a television receiver, which may be a black and white or color television receiver. Mo
 st of the circuitry of this receiver is conventional, and for that reason it has not been shown in FIG. 1. Added to the conventional television receiver circuitry of FIG. 1, however, is a frequency synthesizer tuning system, in accordance with a preferred embodiment of the invention, which is capable of automatically changing the reference frequency when a frequency offset exists in the received signal for a particular channel.
st of the circuitry of this receiver is conventional, and for that reason it has not been shown in FIG. 1. Added to the conventional television receiver circuitry of FIG. 1, however, is a frequency synthesizer tuning system, in accordance with a preferred embodiment of the invention, which is capable of automatically changing the reference frequency when a frequency offset exists in the received signal for a particular channel. Transmitted composite television signals, either received over the air or distributed by means of a master antenna TV distribution system, are received by an antenna 10 or on antenna input terminals to the receiver. As is well known, these composite signals include picture and sound carrier components and synchronizing signal components, with the composite signal applied to an RF and tuner stage 11 of the receiver. The stage 11 includes the conventional RF amplifiers and tuner sections of the receiver, including a VHF oscillator section and a UHF oscillator section. Preferably, the UHF and VHF oscillators are voltage controlled oscillators, the freuency of operation of which are varied in response to a tuning voltage applied to them to effect the desired tuning of the receiver.
The output of the RF and tuner stages 11 is applied to the remainder of the television receiver 14, which includes the IF amplifier stages for supplying conventional picture (video) and sound IF signals to the video and sound processing stages of the receiver 14. The circuitry of the receiver 14 may be of any conventional type used to separate, amplify and otherwise process the signals for application to a cathode ray tube 16 and to a loudspeaker 17 which reproduce the picture and sound components, respectively, of the received signal.
The receiver 14 also includes a conventional AFT or automatic fine tuning discriminator circuit and additionally may include a synch separator circuit for producing an output in response to the presence of vertical synchronizatin pulses, a picture carrier detection circuit, and an automatic gain control (AGC) amplifier. Outputs representative of these sensor components are shown as being coupled over a group of lead 20 to sensory circuitry 22, which in turn couples outputs representative of the operation of these various sensor circuits to a microprocessor unit 23 for controlling the operation of the microprocessor unit.
The microprocessor unit 23 is utilized in the system of FIG. 1 for controlling the operation of a frequency synthesizer tuning system capable of automatic offset correction. When the viewer desires to select a new channel, he enters the desired channel number into a channel selection keyboard 25. There are a number of different keyboards which may be employed to accomplish this function, and the particular design is not important to this invention. The channel selector keyboard 25 also may include switches or keys for initiating a signal seek function in either the "up" or "down" direction.
Information represented by the selection of channel numbers on the keyboard 25 is supplied to the microprocessor unit 23 which provides output signals over a corresponding set of leads 27 to the tuners (local oscillators) 11 to effect the appropriate band switching control for the tuners 11 in accordance with the particular channel which has been selected. In addition, the keyboard 25, operating through the microprocessor unit 23, provides output signals which operate a channel number display 29 to provide an appropriate display of the selected channel number to the viewer.
The output of the oscillator 34 also is applied through a countdown circuit or programmable frequency divider 35. Conventional frequency synthesizer techniques are employed; and the microprocessor unit 23 automatically compensates, through appropriate code converter circuitry, for the non-uniform channel spacing of the television signals. It has been found most convenient to cause the programmable frequency divider 31 to divide by numbers corresponding directly to the oscillator frequency of the selected channel, for example, 101, 107, 113 . . . up to 931.
In accordance with the time division multiplex operation of the microprocessor 23, the count of the programmable frequency divider 35 initially is adjusted to a fixed count by the application of appropriate output signals from the microprocessor unit 23 to a point selected to be at or near the mid-point of the operating range of the programmable frequency divider 35. Thus, the output of the divider 35 is a stable reference frequency (because the input is from the reference crystal oscillator 34) which is used to establish initially and to maintain tuning of the receiver to the selected channel.
The output of the programmable divider 35 is applied to one of two inputs of a phase comparator circuit 37. The other input to the phase comparator circuit 37 is supplied from the selected one of the VHF or UHF oscillators in the tuner stages 11 through the programmable frequency divider 31. The phase comparator circuit 37 operates in a conventional manner to supply a DC tuning control signal through a phase locked loop filter circuit 39 and over a lead 40 to the oscillators in the tuner system 11 to change and maintain their operating frequency.
With the exception of the use of the microprocessor unit 23, the operation of the system which has been described thus far is that of a relatively conventional frequency synthesizer system incorporated into a television receiver. This system is similar to the system of the '953 patent. As in the system of that patent, the system shown in FIG. 1, when the transmitted station or station received on a master antenna distribution system provides the station or channel signals at the proper frequency, operates as a relatively conventional frequency synthesizer system. If, however, there is a frequency offset in the received signal to cause the carrier of the received signal to be displaced from the frequency which it should have to some other frequency, it is possible that the system would give the appearance of mistuning to the received station. The microprocessor 23, operating in conjunction with the sensory circuitry 22, is employed in conjunction with the countdown or programmable frequency divider circuit 35 to eliminate this disadvantage and still retain the advantages of frequency synthesizer tuning.
Reference now should be made to FIG. 2 which shows details of t
 he interface between the keyboard 25, the microprocessor unit 23, and the circuitry used in the frequency synthesizer portions of the system. A commercially available microprocessor which has been used for the microprocessor 23, and which forms the basis for the diagramatic representation of the microprocessor in FIG. 2, is the Matsushita Electronics Corporation MN1402 four-bit single-chip microcomputer. This microcomputer has two, four-bit parallel input ports labeled "A" and "B". In addition, three output ports, a five-bit output port "C" and two four-bit output ports "D" and "E" are provided. The internal configuration of the microcomputer 23 includes an arithmetic logic unit (ALU), a read only memory (ROM) for storing instructions and constants, and a random access memory (RAM) used for data memory, arranged into four files, each file containing 16 four-bit words. These words are selected by X and Y registers and this memory is used, for example, for timers, counters, etc., and also is used to hold intermediate results. To facilitate an understanding of the operation of the system, a portion of this memory is shown in FIG. 2 as a clock 81 and a reversible counter 82 connected between the "B" input port and the "D" output port. The microcomputer 23 is programmed to permit it to operate in conjunction with the remainder of the circuits shown in FIG. 2. The programming techniques are standard, and the microcomputer 23 itself is a standard commercially available circuit component.
he interface between the keyboard 25, the microprocessor unit 23, and the circuitry used in the frequency synthesizer portions of the system. A commercially available microprocessor which has been used for the microprocessor 23, and which forms the basis for the diagramatic representation of the microprocessor in FIG. 2, is the Matsushita Electronics Corporation MN1402 four-bit single-chip microcomputer. This microcomputer has two, four-bit parallel input ports labeled "A" and "B". In addition, three output ports, a five-bit output port "C" and two four-bit output ports "D" and "E" are provided. The internal configuration of the microcomputer 23 includes an arithmetic logic unit (ALU), a read only memory (ROM) for storing instructions and constants, and a random access memory (RAM) used for data memory, arranged into four files, each file containing 16 four-bit words. These words are selected by X and Y registers and this memory is used, for example, for timers, counters, etc., and also is used to hold intermediate results. To facilitate an understanding of the operation of the system, a portion of this memory is shown in FIG. 2 as a clock 81 and a reversible counter 82 connected between the "B" input port and the "D" output port. The microcomputer 23 is programmed to permit it to operate in conjunction with the remainder of the circuits shown in FIG. 2. The programming techniques are standard, and the microcomputer 23 itself is a standard commercially available circuit component. There are several system parameters that must be selected in the operation of the system shown in FIG. 2. The selection of the nominal frequency of the two signals that feed the phase comparator circuit 37 is an example. Channel selection is provided by changing the frequency division ratio of the selector counter 31 which divides the local oscillator signal after this signal is passed through a prescaler circuit 32 and a divide-by-two divider circuit 41. The nominal frequency from the programmable frequency divider 31 (selector counter) is selected so that the local oscillator (tuner) 11 can be set exactly on frequency for all channels.
A compromise solution which is utilized in the circuit of FIG. 2 is to cause the frequency division chain from the local oscillator 11 in the tuner to the phase comparator 37 to be composed of the fixed divide-by-256 prescaler 32, and a fixed divide-by-4 division, which is accomplished by the divider 41 at the input of the counter 31 and a second divider 42 at the output of the counter 31. The variable frequency divider counter 31 then is loaded by means of three latch circuits 44, 45 and 46 at an appropriate time by the time division multiplex operation of the microcomputer 23 and a number that programs the programmable frequency divider counter 31 to divide by the numerical value of the frequency of the local oscillator in MHz for the channel selected. For example, if the receiver is to be tuned to channel 2, which has a nominal local oscillator frequency of 101 MHz, the programmable frequency divider 31 is set to divide by 101. If the receiver is to be tuned to channel 83, which has a nominal local oscillator frequency of 931 MHz, the programmable frequency divider 31 is set to divide by 931. In both cases, the variable divider 31 produces a 1 MHz signal. However, because of the fixed divide-by-256 and the two fixed divide-by-two dividers in series with the programmable divider 31, an output frequency of 976.5625 Hz is supplied from the output of the divider 42 to the upper input of the phase comparator 37.
The division ratio of the selector counter 31 is established by appropriate output signals from the latch circuits 44, 45 and 46, as mentioned above. The initial operation for changing, or maintaining, the division ratio of the divider 31 is established by an entry of the two digits of the selected channel number in the keyboard 25. The microcomputer 23 operates as a time division multiplex system for continuously monitoring the input ports and the output ports to control the operation of the remainder of the system. The selection of the two digits of the desired channel number is affected by a time division multiplex iscanning of the outputs of the D output port of microcomputer 23 and providing that information at the A input port. From here the information is translated again to the D output ports to the appropriate drivers of the channel number display circuit 29 and to the latches 44, 45 and 46, and to a pair of similar four bit latches 49 and 50 which control the divider ratio of the counter 35.
Although the D output ports of the microcomputer 23 are connected in common to all of these various portions of the circuit, the selection of which of the latches are enabled to respond to the particular output signals appearing on the D output ports at any given time is effected through the C and E output ports of the microcomputer 23 in a time division multiplex fashion. A decoder circuit 52, connected to the lowermost three outputs of the E output port of the microcomputer 23, is used to apply unique decoding signals at different times in the time division multiplex sequence of operation of the microcomputer 23 to the five latch circuits 44, 45, 46, 49 and 50, respectively. At any given time in the sequence, only one of these latch circuits is enabled for operation. A latch load signal is applied from the upper output (EO3) at each cycle of operation of the signals appearing on the E output port to set the latch circuit which is enabled by the output of the decoding circuit 52 with the data appearing on the other inputs to the latch circuit. This data simultaneously appears on the four outputs of the D output port of the microcomputer 23.
Thus, in rapid sequence, the latch circuits 44, 45 and 46 are set to store the division number corresponding to the selected channel entered onto the keyboard 25, and the latch circuits 49 and 50 are each operated to set the programmable divider reference counter 35 to a center or nominal count, which is always the same upon the selection of a new channel on the keyboard 25. Similarly, the two right-hand outputs of the C output port (CO6 and CO5) enter the two digits of the selected channel number in the drivers of the display circuit 29 at the proper time in the binary encoded sequence when these digits appear on the four-bit binary encoded representation of the D output port. This results in a visual display of the channel number selected.
In addition to the selection of a channel number directly by the keyboard 25, the keyboard also may include an additional switch 56, which is scanned in the time division multiplex sequence to determine if the receiver is placed in a "seek" mode of operation (when the signal seek capability is incorporated into such a receiver). Operating in conjunction with the signal seek switch 56 are a pair of "up" and "down" seek direction input switches shown with a graphic representation of the seek directions on the keyboard 25. A further provision is provided by two keys labeled "U" and "D", which are used for "manual" fine tuning of the receiver in the "up" or "down" directions depending upon which of the two keys U or D has been operated. The keyboard 25 includes one additional switch 58 which may be used to disable the automatic fine tuning (AFT) portion of the circuit by rendering the microcomputer insensitive to the signal output from the AFT circuit, in a manner described more fully subsequently.
As is ap
When the system is placed in its automatic mode of operation (similar to the mode of operation of the above mentioned '953 patent), the counter 82, integrally formed as part of the microcomputer 23, continuously adds or subtracts one number at a time from the nominal value or programmable division fraction entered into the programmable frequency divider 35 at the outset of each new channel number selection when frequency offset (mistuning) is present. The counter 82 is driven at a relatively high counting rate by clock pulses from the clock 81 during this initial or forced search mode of operation. Thus, automatic offset correction is provided for any channel which is off its assigned frequency. The offset correction automatically adjusts the frequency of the local oscillator by changing the division ratio of the signal from the reference oscillator 35 applied to the lower input of the phase comparator 37. By doing this, the output of the phase comparator 37 applied to the local oscillator 11 varies to cause the oscillator to be tuned in the proper direction to compensate for the transmitting station mistuning.
When the system is operating in its automatic mode of operation, the microcomputer 23 responds to the sensor information applied to it on its B input ports and on the S1 input port shown in FIG. 2. These inputs are obtained from the various outputs of the operational amplifiers shown connected to the corresponding input ports in the detailed circuit of FIG. 3. Depending upon whether the receiver is provided with a signal seek feature or not, one or more of the sensory inputs of the circuit of FIG. 3 are used. The s
 ystem shown in the drawings has a capability of correcting for frequency offsets larger than 1.5 MHz on channels 2 and 7 and approximately 2 MHz on channels 6 and 13. The remainder of the channels have a range between these two values.
ystem shown in the drawings has a capability of correcting for frequency offsets larger than 1.5 MHz on channels 2 and 7 and approximately 2 MHz on channels 6 and 13. The remainder of the channels have a range between these two values. If the receiver is not tuned properly, the micromputer 23 executes the localized search of the tuning range mentioned above. Since there is a necessary settling down time for the tuning of a television receiver immediately following selection of a new channel, a time interval of 250 milliseconds has been selected to prevent any localized search or offset frequency correction until the expiration of this "settling down" time period. If, at the end of this 250 millisecond time interval, a properly tuned station is present, this is indicated by the sensory outputs from the television receiver and no localized search is effected to change the division ratio or programmable divider count in the reference counter 35 for a system that also has signal seek.
A system with no signal seek capability is described later that requires less sensory input but which uses a time period where a forced search is required directly after the settling time interval.
The lower graph of FIG. 5 plots the relative frequency of the local oscillator 11 to the received signal frequency with respect to time. The various arrows are used to indicate the manner of operation of the counter 82 in the microcomputer 23 in conjunction with the reference counter 35 for adjusting for any mistuning conditions which may exist after the initial station selection has been effected in the manner described above.
If the receiver is properly tuned, the outputs from the comparators 62 and 63 of FIG. 3 which are combined together and applied to the input port B11 of the microcomputer 23, provide an indication that the tuning is within the properly tuned center frequency window. As a consequence, no further operation of the microcomputer to change any of the outputs applied to the latch circuits 49 and 50 for the duration of this condition is effected. On the other hand, if the receiver is mistuned on either side of the proper tuning frequency, the various operating characteristics shown in FIG. 5 are effected.
Assume initially that the receiver is capable of making tuning adjustments over a range of fc plus Δf to fc minus Δf, as indicated in the top waveform of FIG. 5. Three specific examples of mistuning will then be considered. Initially, assume that the local oscillator is mistuned relative to the received signal to a frequency f1 as shown in the lower graph of FIG. 5. In this condition, the outout of the frequency discriminator 60 is positive since this signal frequency lies to the lefthand side of the center or properly tuned region of operation of the discriminator. Under this condition of the operation, the input signal applied to the sensor port B12 of the microcomputer 23 is such that the microcomputer counter 82 is caused to advance in a positive direction to change the programmable division ratio or count of the reference counter 35 in a manner to force the output of the phase comparator 37 to adjust the frequency of the local oscillator until the proper tuning indicated at point B in the lower graph of FIG. 5 is reached. The time interval for accomplishing this result is measured from the upper end of the arrow representative of the frequency f1 to the point B.
Now assume that the receiver mistuning is to a frequency f2 which as shown in FIG. 5 as located on the righthand-side of the center axis fc. In this condition, the discriminator output is negative. This is reflected in the output of the comparator 61 applied to the input port B12 of the microcomputer 23. The polarity of this signal is identified by the microcomputer 23 to cause the counter 82 in it to operate in the reverse direction. As this count is applied on a step-by-step basis through the latch circuits 49 and 50 to the reference counter 35, the division ratio or count of the reference counter (divider) 35 is changed. As a result, the reference oscillator signal applied to the phase comparator 37 causes the phase comparator 37 output to drive the local oscillator frequency in a direction opposite to that considered in the first example. This is shown by the vector interconnecting the top of the arrow representative of f2 to point A on the time/frequency graph of FIG. 5.
As discussed in the general discussion above, whenever the tuning frequency reaches the narrow window on either side of fc, the outputs of the comparators 62 and 63 provide the necessary indication on the sensory input port terminal B11 to cause termination of the operation of the counter 82 in the microcomputer 23. Then the reference counter 35 remains set to the count attained just prior to the appearance of this input signal on the input port B11 of the microcomputer 23.
A third mistuning condition can exist, and ordinarily this condition results in an ambiguity which cannot be corrected simply by responding to the signal polarity at the output of the frequency discriminator. This is indicated by the mistuned condition where the difference between the local oscillator frequency f3 and the transmitter frequency is such that the signal f3 lies in the range to the right of the negative portion of the discriminator output shown in the upper waveform of FIG. 5. In this condition, the associated sound causes the discriminator output to be positive; so that the television receiver normally would attempt to tune toward the next adjacent channel and away from the properly tuned center frequency of the channel which is desired. The output of the discriminator 60 in this situation is the same as it was in th
 e first example considered for frequency f1; so that the counter 82 of the microprocessor 23 operates to change the count in the reference counter 35 in a manner to cause the local oscillator frequency to go higher toward a frequency f3 +Δf, as shown in FIG. 5.
e first example considered for frequency f1; so that the counter 82 of the microprocessor 23 operates to change the count in the reference counter 35 in a manner to cause the local oscillator frequency to go higher toward a frequency f3 +Δf, as shown in FIG. 5. A predetermined number of counts of the counter 82 in the microcomputer 23 are necessary for the microcomputer to count through the frequency range Δf, and this range is selected to be within the pull in or operating range of the system. Once this count has been attained, the microcomputer counter 82 immediately is reset back to a count which corresponds to a frequency 2 Δf lower than the frequency attained by the maximum count. This is indicated in FIG. 5 by the frequency f3-Δf. Because the microcomputer counter 82 is limited to counting a number of counts equal to Δf, this new frequency now is on the lefthand side of the center line fc, shown in both waveforms of FIG. 5. This places the local oscillator frequency at a point such that the frequency discriminator output is the positive output shown on the lefthand-side of the upper waveform of FIG. 5. Counting continues in the same direction as previously. This time, however, it is in a proper direction to bring about correct tuning; and when the center frequency is reached, the output of the comparators 62 and 63 cause the microcomputer 23 to stop its count. The proper tuning point attained is indicated at point C on the graph of the lower part of FIG. 5.
The counter 82 of the microcomputer 23 is operated by the clock 81 during the foregoing sequence of operation, immediately following the selection of a new channel by the operation of the keyboard 25, at a fast or high speed operation. Typically, the counter steps are 10 milliseconds per step; so that there are no initial visual effects which can be noticed by an observer of the television screen of the receiver being tuned. The maximum forced search period is approximately 900 milliseconds in duration. At the end of this time interval, a timer in the microcomputer 23 causes a signal to be applied through the outputs of the E output port to the decoder circuit 52 indicative of the completion of this time interval. The decoder 52 then applies a pulse on an output lead connected to the B13 input of the B input port of the microcomputer 23. This pulse is sensed by the microcomputer 23 and is applied to the clock 81 to change the clock rate to a much slower rate, approximately one-third (1/3) or one-fourth (1/4) the rate used previously during the forced search mode of operation. This then permits the system to accomodate station drifts which normally occur at a very slow rate during the transmission and reception of a television signal. As a consequence, it is possible to use more filtering in the filter 39 on the tuning line (FIG. 1) and employ a smaller frequency window for the channel verification sensed by the circuitry shown in FIG. 3. The result is a more precise tuning from the receiver than is otherwise possible if only a high speed operation of the clock 81 is utilized.
When the channel once again is changed by operation of the keys in the keyboard 25 or operation of the channel selection circuitry from a remote control unit, this new channel input is sensed by the microcomputer 23 from the signals applied to the A input port and the clock 81 is reset to its fast time or the forced search mode of operation; and the process resumes.
Instead of employing an additional decoding function in the decoder 52, a separate decoder also could be connected to the outputs of the D output ports to feed back the signal to the B13 input terminal of the B input port of the microcomputer 23. The operation of the system to change the rate or frequency of the pulses applied by the clock 81 to the counter 82 otherwise is the same as described above.
Although applicant has found that it is preferable to correct for mistuning or frequency offsets by adjusting the count or division ratio of the counter 35, such offset adjustments also could be effected by adjusting the count in the counter 31 in the local oscillator signal line. The operation in such a case is the same as described above for adjusting the count in the counter 35.
If the receiver is to be used with an automatic signal seek mode of operation, however, additional sensory inputs are necessary. These inputs operate in conjunction with the output of the frequency discriminator 60. The operation of the microcomputer 23 in controlling the count of the reference programmable frequency counter divider 35 is the same as described above. The additional sensory inputs simply are used in conjunction with the outputs of the comparators 62 and 63 to signal the microcomputer 23 to assure that tuning is to a picture channel rather than an adjacent sound channel. This is accomplished by utilizing the output of the synchronizing signal separator 65 which is applied to a comparator 67 to produce an output signal to the SNS1 sensory input of the microcomputer 23 only when vertical synchronizing signal components are present.
In addition, the output of a picture carrier detector 69 is applied to the input of a comparator 70 to produce an output to the B10 sensory input of the microcomputer 23. If the picture carrier detector 69 is producing an output indicative of the presence of a carrier, but no output is being obtained from the vertical synch separator 65 at the same time, the system is mistuned to a sound carrier and the microcomputer 23 is permitted to continue its localized search until a properly tuned station is found. Only when there is coincidence of signals from the picture carrier detector 69, the synch signal separator 65, and the automatic frequency discriminator window as determined by the comparators 62 and 63, is the microcomputer operation terminated to indicate that a properly tuned channel is present.
Further insurance of tuning the receiver only to a strong signal also can be provided by the addition of an AGC amplifier 72. This is connected to a comparator 74 coupled to the B10 input port along with the output of the picture carrier detector comparator 70. When the AGC amplifier 72 is used as a sensory input, the microcomputer operation, when the system is used in a signal seek mode, is only terminated to indicate reception of a valid signal when that signal is strong enough to produce the desired output from the comparator 74. The signal level which is acceptable is set by a potentiometer 75.
It should be noted that when the system is operated in a signal seek mode, the sensory inputs must indicate the reception of a properly tuned signal within a pre-established time period. If no signal is sensed by the various sensory input circuits operating in conjunction with one another as described above, the microcomputer 23 automatically steps to the next channel number and repeats the sequence of operation described above. This is when it is placed in its signal seek mode of operation. If signal seek is not employed, the additional sensory circuits 65, 69 and 72 are not necessary, and the inputs to the microcomputer which are provided from these sensory circuits are not utilized. The sensory signal input which is used both for a receiver without a signal seek capability of operation and for a receiver which has a signal seek mode of operation in it, is the output of the frequency discriminator 60 operating in conjunction with the comparators 61, 62 and 63 as described above.
The fast time or forced search operation of the system can be terminated in a different way other than the preestablished time-out period described above in conjunction with the operation of the circuit shown in FIG. 2. Generally, it is desirable to build into the system (or program into the system by means of software) such a maximum time-out period to effect the operation which has been described above to terminate the search and cause the clock 81 thereafter to operate in a low speed mode of operation. Termination also can be accomplished by sensing the number of changes in the direction sensor input applied to the B12 terminal of the B input port to cause the search to be terminated when this direction changes three times (or more). By doing this, any flicker that might be observed on the screen of the television receiver is minimized, since the forced search still takes place at the high rate of application of clock pulses from the clock 81 to the counter 82 in the same manner described above.
Termination of the search, however, also may be effected by means of a search terminate counter 78 (FIG. 3), which is advanced by pulses applied to it each time the output of the comparator 61 changes its sign (indicative of a change in direction for the counter 82) as applied to it through the B12 input port, as described earlier. After three of these changes, or some other number if desired, an output pulse is obtained from the search terminate counter 78 and is applied to the SNS0 input of the microcomputer 23. This causes the operation of the clock 81 to be switched to its low speed mode of operation to terminate the fast or "forced search" mode of operation. The next time a new channel number is entered on the keyboard 25, a reset pulse is applied to the search terminate counter 78 to reset it to its original or zero count, thereby readying it for anothe
FIG. 4 shows the control sequence of the system which is stored in the ROM (Read Only Memory) of the microcomputer 23. The microcomputer 23 operates by always running through the flow sequence, via loops L1, L2 and L3. Loop L1 corresponds to a new channel selection by two digit number entry. Loop L2 corresponds to channel number increment or decrement by an up or down key operation, respectively, or by seek operation. Loop L3 corresponds to fine tuning, either manual or automatic. To obtain exact timing for system control, the microcomputer 23 receives a standard timing pulse from the output of the reference counter 35 divided in a divide-by-five counter 80 and applied to the A13 input port of the microcomputer 23. The control functions which are programmed into the microcomputer 23, as indicated in the flow chart of FIG. 4, are outlined in the following paragraphs.
Channel Number Correction: An invalid two digit channel number entry (0, 1, 84, 99) is corrected. When the operation of the receiver is in the signal seek mode, the next channel up from 83 is channel 2, and the next lower channel from channel 2 is 83.
PLL Control I: For a given channel number, a corresponding binary code for the PLL selector counter 31 is derived as described previously. For UHF channels, the local oscillator frequency separation between two adjacent channels is 6 MHz and the code for PLL is generated by the microcomputer 23 through means of a simple calculation. This code then is transferred from the microcomputer 23 to the latches 44, 45 and 46 as described previously.
PLL Control II: This routine of the microcomputer 23 is used to transfer the fine tuning data to the latches 49 and 50 which control the count of the reference counter 35 in the PLL circuit.
Channel Number Display: The channel number is transferred from the microcomputer 23 to the driver latches of the display driver circuit 29.
Key Input Detection: The keyboard is arranged as the matrix circuit shown in FIG. 2. ROM programming for scanning and acknowledging a keyboard entry only after successive indications provides protection against false entry due to contact bounce. The four data output lines of the D output port of the microcomputer 23 are used to transfer data to the phase lock loop section of the circuit and to the display circuit 29, as well as for scanning the keyboard matrix circuit.
Time Count: The microcomputer 23 receives a basic timing pulse of approximately 200 Hz from the output of the divider 80 and performs various controls for each timing pulse. By way of example, sensing for the vertical synch input (when the system is used with a signal seek capability) on the input port SNS1 takes place every 2.5 milliseconds. Automatic seek timing is selected to be 133 milliseconds for UHF channels. All of these timing pulses are derived from the basic synchronization timing pulse applied to the microcomputer on the A13 input port from the output of the divider 80. Various other timing values used in the microcomputer to properly time multiplex sequence the operation are derived from this basic timing pulse.
Mode Detection: The status of the seek and automatic/manual (A/M) switches are detected. If the A/M switch (not shown) is in its automatic position, automatic seek and offset correction are active. If only the seek switch is on, only seek is performed. If the A/M switch is in manual, manual fine tuning (MFT) is active.
Automatic Mode: If the TV receiver is not properly tuned for VHF channels in automatic, the local oscillator frequency is shifted automatically toward proper tuning. The fine tuning data is generated in the microcomputer 23 and is transferred to the latches 49 and 50 for the reference counter 35 in the PLL circuit.
Manual Fine Tuning (MFT) Control: The local oscillator frequency is shifted by pushing the fine tuning up (U) or down (D) pushbutton or switch. This MFT control can be applied to VHF channels as well as to UHF channels.
Channel Up/Down: When a channel up (upward pointing arrow) or down (downward pointing arrow) key closure in the keyboard 25 is detected, or upon a direct access to an unused channel, this routine is activated and the system will advance to the next channel in the selected direction.
The foregoing embodiment of the invention which has been described above and which is illustrated in the drawings is to be considered illustrative of the invention, which is not limited to the specific embodiment selected for this purpose. For example, hard-wired logic could be used to achieve the various circuit operations which are accomplished by the microcomputer 23 in conjunction with the other portions of the system. The relative ease of programming and debugging the microcomputer 23, however, make it much simpler to implement the system operation with the microcomputer than with hard-wired logic. With respect to the sensor circuit inputs to the system, an added degree of operating assurance can be provided by the addition of a sound carrier sensor in addition to the picture carrier sensor shown in FIG. 3. If this feature is desired, the output of the comparator for the sound carrier is combined with the outputs of the comparators 70 and 74 at the input terminal B10 of the B input port of the microcomputer 23. Because of the manner of the circut operation which has been described previously, however, the addition of a sound carrier detector to the system is not considered necessary, even for a system operating in the signal seek mode of operation. This is in contrast to conventional television receivers having a signal seek operation, in which detection of the sound carrier generally is a necessity to insure that mistuning of the receiver to an adjacent sound carrier does not take place.
TDA2595 Horizontal combination
GENERAL DESCRIPTION
Features
· Positive video input; capacitively coupled (source impedance < 200 W)
· Adaptive sync separator; slicing level at 50% of sync amplitude
· Internal vertical pulse separator with double slope integrator
· Output stage for vertical sync pulse or composite sync depending on the load; both are switched off at muting
· j1 phase control between horizontal sync and oscillator
· Coincidence detector j3 for automatic time-constant switching; overruled by the VCR switch
· Time-constant switch between two external time-constants or loop-gain; both controlled by the coincidence detector j3
· j1 gating pulse controlled by coincidence detector j3
· Mute circuit depending on TV transmitter identification
· j2 phase control between line flyback and oscillator; the slicing levels for j2 control and horizontal blanking can be set
separately
· Burst keying and horizontal blanking pulse generation, in combination with clamping of the vertical blanking pulse
(three-level sandcastle)
· Horizontal drive output with constant duty cycle inhibited by the protection circuit or the supply voltage sensor
· Detector for too low supply voltage
· Protection circuit for switching off the horizontal drive output continuously if the input voltage is below 4 V or higher
than 8 V
· Line flyback control causing the horizontal blanking level at the sandcastle output continuously in case of a missing
flyback pulse
· Spot-suppressor controlled by the line flyback control.
The phase-lock loop circuit of the video display apparatus is synchronised by a horizontal synchronising input signal. The phase-lock loop circuit includes a frequency-to-voltage converter that is responsive to the synchronising input signal for generating a control voltage indicative of the frequency of the synchronising input signal. A voltage-to-current converter responsive to the control voltage generates a control current that is indicative of the frequency of the input signal. The control current varies the free running frequency of a controlled oscillator of the phase-lock loop circuit. The free running frequency of the oscillator is directly related to the frequency of the input signal. The phase of the output signal of the oscillator is controlled by a second control current that is indicative of the phase difference between the oscillator output signal and the synchronising input signal. When the frequency of the input signal is lower than a predetermined frequency, the first control current is at a level that causes the free running frequency to be above a predetermined minimum frequency.
PHILIPS TDA2653A Vertical deflection circuit
DESCRIPTION
The TDA
2653A is a monolithic integrated circuit for vertical deflection in large screen colour television receivers.The circuit incorporates the following functions:
· Oscillator; switch capability for 50 Hz/60 Hz operation
· Synchronization circuit
· Blanking pulse generator with guard circuit
· Sawtooth generator with buffer stage
· Preamplifier with fed-out inputs
· Output stage with thermal and short-circuit protection
· Flyback generator
· Voltage stabilizers.
APPLICATION INFORMATION
The function is described against the corresponding pin number
1, 13. Oscillator
The oscillator frequency is determined by a potentiometer at pin 1 and a capacitor at pin 13.
2. Sync input/blanking output
Combination of sync input and blanking output. The oscillator has to be synchronized by a positive-going
pulse between 1 and 12 V. The integrated frequency detector delivers a switching level at pin 12.
The blanking pulse amplitude is 20 V with a load of 1 mA.
3. Sawtooth generator output
The sawtooth signal is fed via a buffer stage to pin 3. It delivers the signal which is used for linearity control,
and drive of the preamplifier. The sawtooth is applied via a shaping network to pin 11 (linearity) and via a
resistor to pin 4 (preamplifier).
4. Preamplifier input
The DC voltage is proportional to the output voltage (DC feedback). The AC voltage is proportional to the
sum of the buffered sawtooth voltage at pin 3 and the voltage, with opposite polarity, at the feedback
resistor (AC feedback).
5. Positive supply of output stage
This supply is obtained from the flyback generator. An electrolytic capacitor between pins 7 and 5, and a
diode between pins 5 and 9 have to be connected for proper operation of the flyback generator.
6. Output of class-B power stage
The vertical deflection coil is connected to this pin, via a series connection of a coupling capacitor and a
feedback resistor, to ground.
7. Flyback generator output
An electrolytic capacitor has to be connected between pins 7 and 5 to complete the flyback generator.
8. Negative supply (ground)
Negative supply of output stage and small signal part.
9. Positive supply
The supply voltage at this pin is used to supply the flyback generator, voltage stabilizer, blanking pulse
generator and buffer stage.
10. Reference voltage of preamplifier
External adjustment and decoupling of reference voltage of the preamplifier.
11. Sawtooth capacitor
This sawtooth capacitor has been split to realize linearity control.
12. 50 Hz/60 Hz switching level
This pin delivers a LOW voltage level for 50 Hz and a HIGH voltage level for 60 Hz. The amplitudes of the
sawtooth signals can be made equal for 50 Hz and 60 Hz with these levels.
TDA2545A TDA2546Quasi-split-sound circuit:
TDA2541 IF AMPLIFIER WITH DEMODULATOR AND AFC

DESCRIPTION
The TDA2540 and 2541 are IF amplifier and A.M.
demodulator circuits for colour and black and white
televisionreceiversusingPNPorNPNtuners. They
are intended for reception of negative or positive
modulation CCIR standard.
They incorporate the following functions : .Gain controlled amplifier .Synchronous demodulator .White spot inverter .Video preamplifier with noise protection .Switchable AFC .AGC with noise gating .Tuner AGC output (NPN tuner for 2540)-(PNP
tuner for 2541) .VCR switch for video output inhibition (VCR
play back).
No comments:
Post a Comment
The most important thing to remember about the Comment Rules is this:
The determination of whether any comment is in compliance is at the sole discretion of this blog’s owner.
Comments on this blog may be blocked or deleted at any time.
Fair people are getting fair reply. Spam and useless crap and filthy comments / scrapers / observations goes all directly to My Private HELL without even appearing in public !!!
The fact that a comment is permitted in no way constitutes an endorsement of any view expressed, fact alleged, or link provided in that comment by the administrator of this site.
This means that there may be a delay between the submission and the eventual appearance of your comment.
Requiring blog comments to obey well-defined rules does not infringe on the free speech of commenters.
Resisting the tide of post-modernity may be difficult, but I will attempt it anyway.
Your choice.........Live or DIE.
That indeed is where your liberty lies.
Note: Only a member of this blog may post a comment.